Table 4-2: registers for initial set-up – PNI SENtral MandM User Manual
Page 16
PNI Sensor Corporation
Doc #1020129 revE
SENtral M&M Technical Datasheet
Page 15
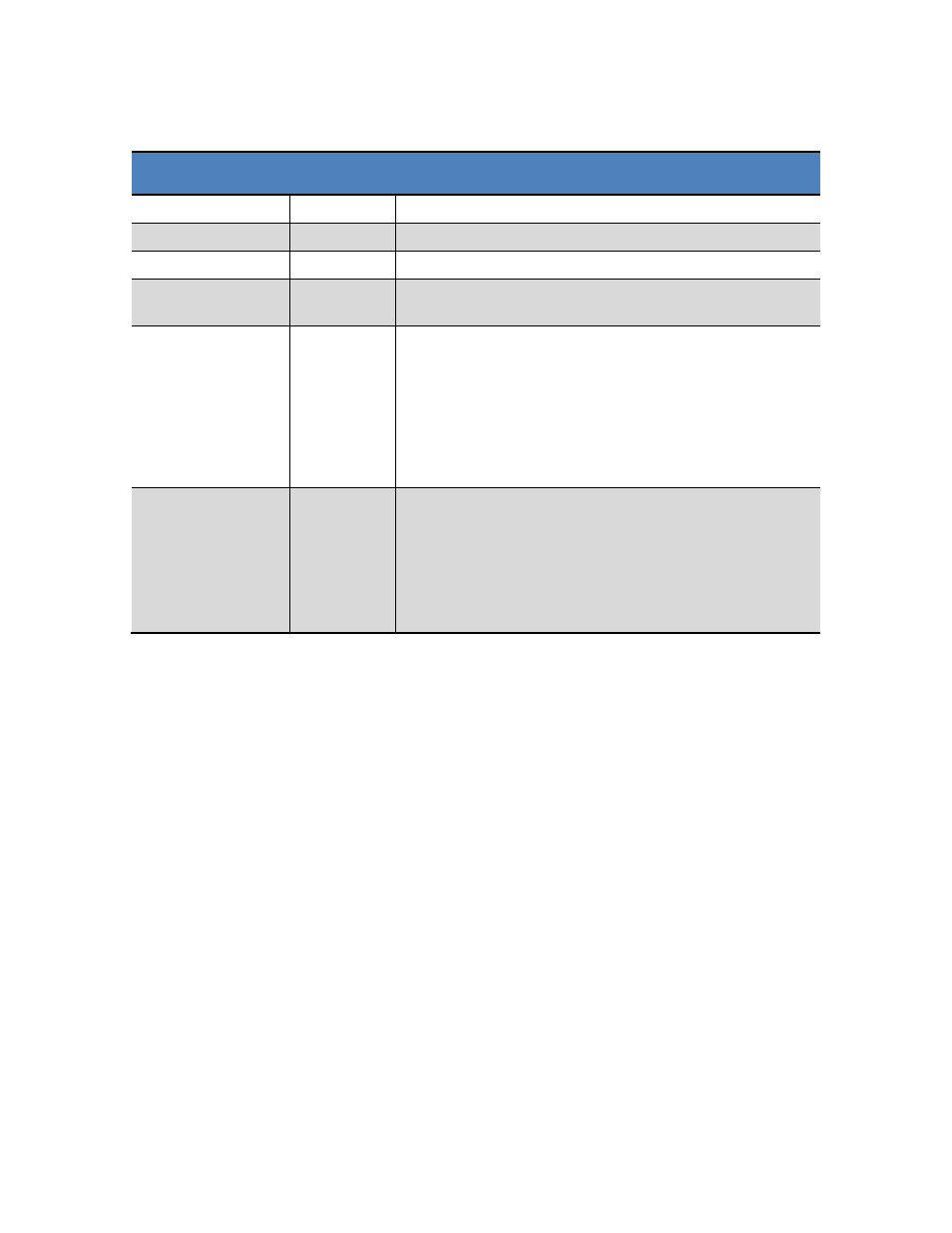
Table 4-2: Registers for Initial Set-up
Register Name
Address
Register Value
MagRate
0x55
Requested magnetometer output data rate
AccelRate
0x56
Requested accelerometer output data rate divided by 10
GyroRate
0x57
Requested gyroscope output data rate divided by 10
QRateDivisor
0x32
Along with GyroRate, establishes output data rate for
quaternion data.
AlgorithmControl
0x54
[0] 1 = StandbyEnable
0 = Disable Standby State (return to Normal Operation)
[1] RawDataEnable. 1 = Raw data provided in MX, MY,
MZ, AX, AY, AZ, GX, GY, & GZ.
0 = Scaled sensor data.
[2] HPRoutput. 1 = Heading, pitch, and roll output in QX,
QY, & QZ. QW = 0.0.
0 = Quaternion outputs.
EnableEvents
0x33
‘1’ indicates an interrupt to the host will be generated for
the event.
[0] CPUReset. Non-maskable
[1] Error
[2] QuaternionResult
[3] MagResult
[4] AccelResult
[5] GyroResult
Perform the following operations to run SENtral as desired.
Set the sensor output data rates (ODRs): MagRate, AccelRate, and GyroRate. If a
sensor rate is set to 0x00, SENtral will shutdown the sensor and disable SENtral
background calibration. There are two major points regarding setting these registers:
o The AccelRate and GyroRate register values should be 1/10
th
the desired ODR,
while the MagRate value should match the desired ODR. For example, if the
desired ODR is 30 Hz for the magnetometer, 100 Hz for the accelerometer, and
200 Hz for the gyroscope, then the respective register values should be 0x1E
(30
d
), 0x0A (10
d
), and 0x14 (20
d
).
o The actual accelerometer and gyro ODRs are limited to the ODRs supported by
the specific sensors. If the AccelRate or GyroRate register values do not
correspond to a supported ODR, then the next highest ODR will be used. For
instance, if the GyroRate register is set to 0x14, which corresponds to 200 Hz, but
the gyro supports 95 Hz, 190 Hz, and 380 Hz, then the actual gyro ODR will be
380 Hz since this is the closest supported rate above that requested by the register.