Table 4-3: normal operation registers – PNI SENtral MandM User Manual
Page 18
PNI Sensor Corporation
Doc #1020129 revE
SENtral M&M Technical Datasheet
Page 17
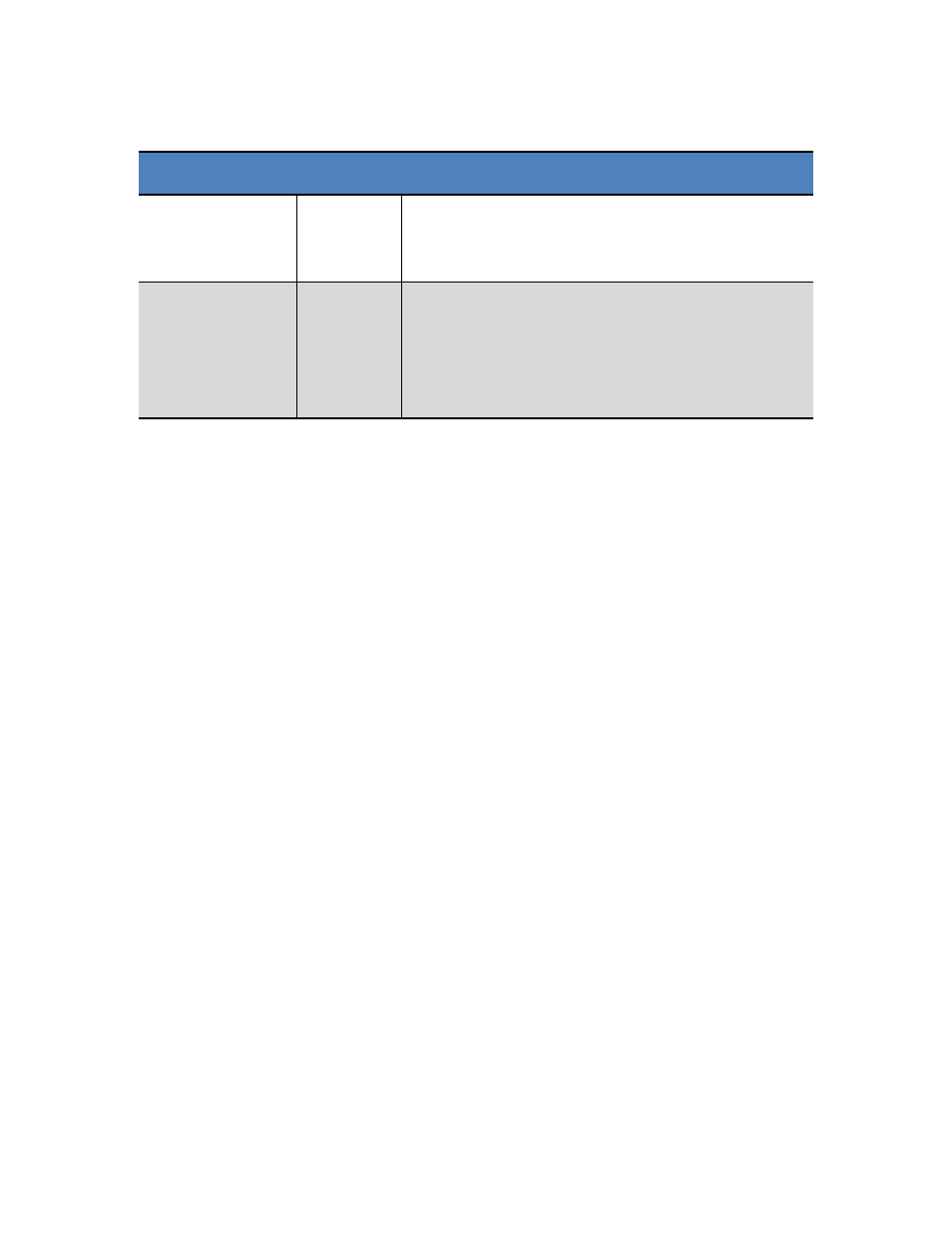
Table 4-3: Normal Operation Registers
Register Name
Address
Register Value
HostControl
0x34
[0] 1 = RunEnable
0 = Enable Initialized State (Standby State generally
is preferred since enabling Initialized State resets the
SENtral algorithm, including calibration data.)
EventStatus
0x35
‘1’ indicates a new event has been generated.
[0] CPUReset
[1] Error
[2] QuaternionResult
[3] MagResult
[4] AccelResult
[5] GyroResult
Below are the steps to follow when operating in Normal Operation state.
a) Write 0x01 to the HostControl register. This sets the RunEnable bit to ‘1’ and
enables the sensors and the SENtral algorithm.
b) If operating in an interrupt-driven mode, then the host waits until it receives an
interrupt signal from SENtral. Alternatively the host may operate on a polling basis,
rather than an interrupt-driven basis, in which case the interrupt line may not be used.
c) Once an interrupt is received by the host or the host otherwise decides to read new
data, read the EventStatus register.
d) Interpret and act on the EventStatus register in the priority shown in Figure 4-3. If bit
[1], the Error bit, is ‘1’, see Section 4.3.1. If bits [2], [3], [4], or [5], the Results bits,
are ‘1’, see Section 4.3.2. Bit [0], the CPUReset bit, should never be ‘1’, since this
bit only can be ‘1’ after a Reset or powering up and prior to loading the Configuration
File, and on the SENtral M&M module loading of the Configuration File is
automatically performed after powering up.
e) Repeat steps c and d until new orientation data is not needed and/or the host decides
to enter a different state.
Reading the EventStatus register clears it. It is possible for more than one bit position to
be ‘1’ in the EventStatus register, especially if the host does not always read the EventStatus
register after receiving an interrupt. Similarly, if multiple bits are set to ‘1’ in the
EventStatus register, once the register is read all the bits will be set to ‘0’. For this reason the
EventStatus register should be processed in the priority shown in Figure 4-3, as information
will be cleared for events that are not handled.