Experiment 8: rotational inertia of the forearm, Introduction, Part a set-up – PASCO ME-6807A Human Arm Model User Manual
Page 23: Procedure, Analysis
®
23
Experiment 8: Rotational Inertia of the Forearm
Introduction
In this experiment, you will use two different methods to estimate the rotational iner-
tia of the forearm with the elbow as the axis of rotation. In part A, you will measure
the period of oscillation. In part B, you will apply a known force and measure the
resulting angular acceleration.
Part A
Set-up
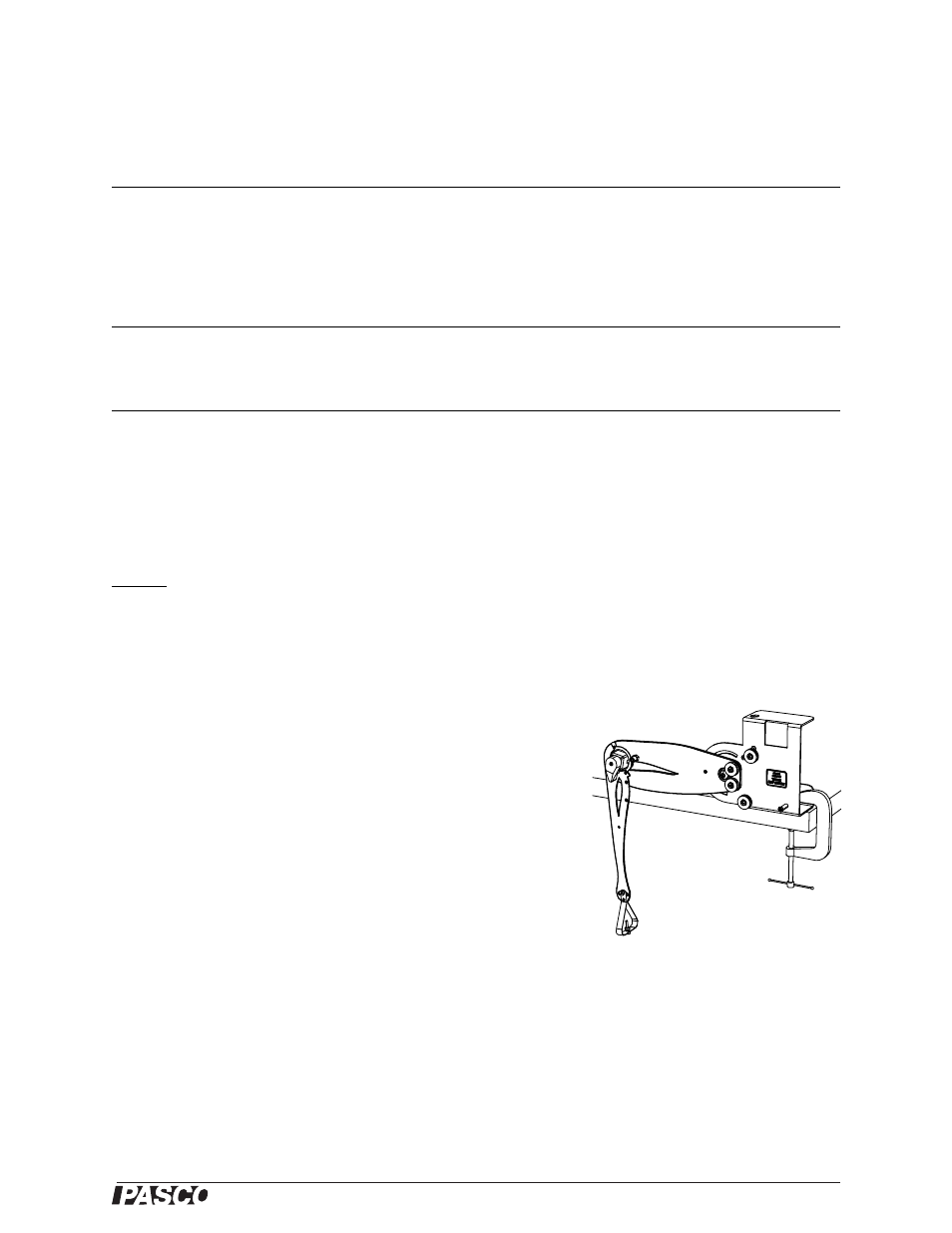
1.
Clamp the arm model upside down as illustrated.
2.
Lock the shoulder in place with the upper arm approximately horizontal.
3.
Set the sampling rate of the angle sensor to 200 Hz.
4.
Prepare a graph to plot elbow angle versus time.
Procedure
1.
Start data collection.
2.
Displace the forearm and release it so that it oscillates freely.
3.
After the forearm stops moving, stop data collection.
Analysis
The rotational inertia (about the axis of the elbow) is given by
,
where T is the period of oscillation (at small amplitudes), M = 0.10 kg is the mass of
the forearm and hand, g = 9.8 m/s
2
, and d = 0.14 m is the distance from the elbow to
the center of mass (the center of mass is marked by a hole).
1.
Determine T from the graph of elbow angle versus time.
2.
Use this value of T to determine the rotational inertia.
Required Parts of Human Arm Model
Arm
Elastic cord
45 cm rod
Sensor-mounting clamp and stud
Other Required Equipment
Angle Sensor
PS-2139
Force Sensor
PS-2104
or PS-2189
C-clamp
SE-7286 (6-pack)
I
T
2
Mgd
4
π
2
(
)
⁄
=