Tuning, Tuning -27 – CONTREX ML-TRIM User Manual
Page 61
3 - 27
Tuning
If your system is unstable, or the speed error is unacceptable, tuning stabilizes speed
error differences between the setpoint and feedback. You can achieve a stable system
using conservative tuning Control Parameter values, however the speed error may be
unacceptable. On the other hand, aggressive tuning Control Parameter values may
cause the system to become unstable. The goal is to reduce the speed error to the
level that you want, yet maintain the system's stability.
To achieve an acceptable level of speed error, adjust the Gain (CP-65) until the system
stabilizes. In systems that require greater accuracy, it may be necessary to adjust the
Integral (CP-66) to reduce any remaining speed error. In systems with low inertia, the
speed error will be reduced more quickly if you enter low values in CP-66. An entry that
is too low, however, can create instability or overshoot the setpoint before reaching the
correct value. Generally, use larger entries for CP-66 on systems with a large inertia.
Sometimes performance can be improved in systems with a large inertia by lowering
the Derivative (CP-67).
The ML–Trim comes factory pre-loaded with default Control Parameters for Tuning.
These default settings are suitable for most applications and do not require
modification. The factory preset, default tuning Control Parameters are found in Table
3-21. To modify these default parameters, refer to Table 3-22. If you are uncertain how
to enter a Control Parameter, review the
Operations: Keypad
section, page 3-3.
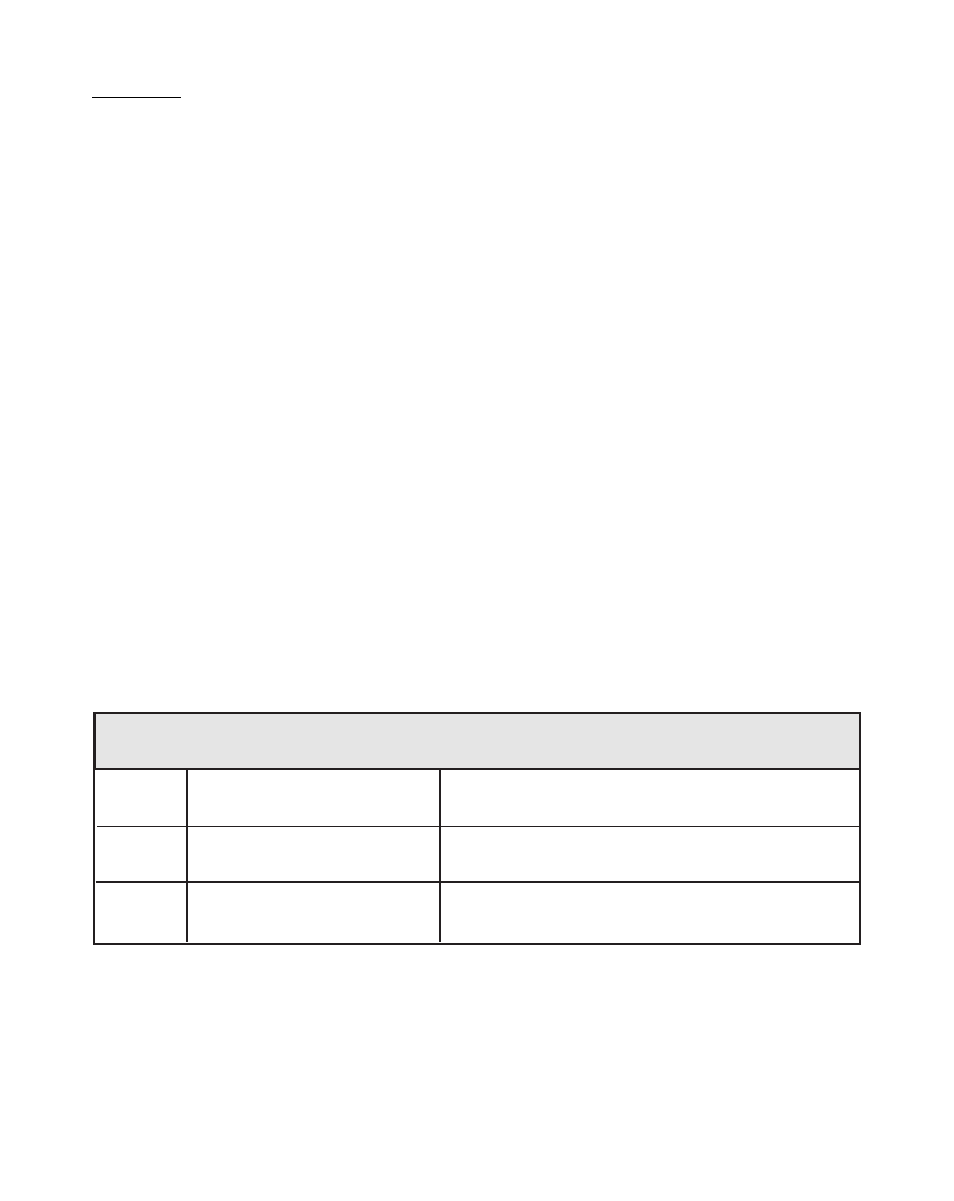
Table 3-21 Default Master or Follower Tuning Control Parameters
CP
Parameter Name
Parameter Value
CP-65
Gain (Proportional)
9000
CP-66
Integral
2000
CP-67
Derivative
9000