English – CEMB USA C88 EVO (C) User Manual
Page 29
29
Use and maintenance manual Rev. 02-2010
ENGLISH
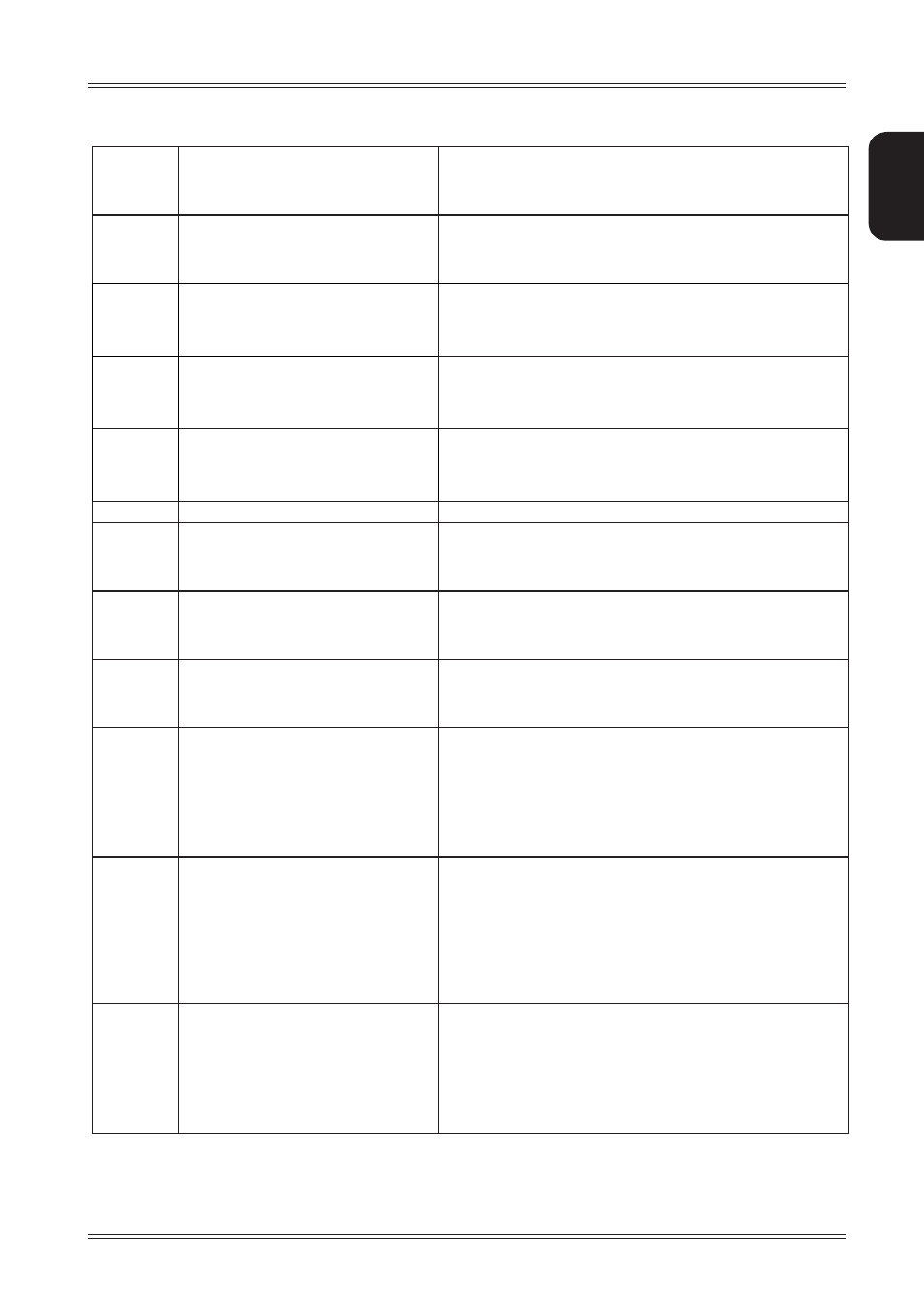
Diagnostics
Err. 20
The wheel comes to a halt before complet-
ing positioning correctly.
1.
Make sure that the wheel to be balanced is at least 10” in diameter.
2.
Verify the correct setting of wheel dimensions on screen.
3.
For wheels less than 12” in diameter wheels: disenable the eccen-
tricity measurement procedure.
Err. 22
Maximum number of spins possible for
the unbalance measurement has been
exceeded.
1. Check that a vehicle wheel has been mounted on the wheel
balancer.
2.
Check in self-diagnostics that the encoder functions properly
3. Replace the computer board.
Err. 24
Distance between the spokes less than 18
degrees.
The minimum distance between the spokes where the
1.
unbalance is to be split must be greater than 18 degrees.
Repeat the SPLIT function increasing the distance between
2.
the spokes.
Err. 25
Distance between the spokes greater than
120 degrees.
The maximum distance between the spokes where the
1.
unbalance is to be split must be less than 120 degrees.
2. Repeat the split function increasing the distance between the
spokes.
Err. 26
First spoke too far from the unbalance
The maximum
1.
distance
between the unbalance position and
the spoke must be less than 120 degrees.
Repeat the split function increasing the distance between the
2.
spokes and the unbalance.
Err. 30
Clock error
Replace the computer board.
Err.40/
Err.41/
Err.42/
Err.43
Eccentricity graph plotting procedure error.
Perform a new eccentricity measurement.
Err.45/
Err.46/
Err.47/
Err.48
Eccentricity graph value display readout
error.
Perform a new eccentricity measurement.
Err.50/
Err.51/
Err.52/
Err.53
Eccentricity graph current value cursor plot-
ting procedure error.
Perform a new eccentricity measurement.
Err.54
Sonar readout error.
Sonar value readout impossible.
1.
Position the eccentricity measurement sonar correctly before per-
forming the measurement.
2.
Check eccentricity sonar connections.
3.
Check the power supplies on the power board.
4.
Replace the eccentricity measurement sonar.
5.
Make sure that the wheel does not halt before completing at least
4/5 revolutions after the fi rst braking impulse.
6.
Replace the computer board.
Err.55
Sonar readout error.
Sonar values are insuffi cient for correct
measurement of eccentricity.
1.
Position the eccentricity measurement sonar correctly before per-
forming the measurement.
2.
Make sure that the wheel does not halt before completing at least
4/5 revolutions after the fi rst braking impulse.
3.
Mount a wheel of medium dimensions (14”x5 ¾”) and perform an
eccentricity measurement . If in these conditions error 55 no longer
occurs, this means that the wheel inertia causing the problem is
such as to half the wheel before having acquired the minimum
number of values necessary for reliable eccentricity measurement.
Err.56
Lateral Sonar readout error.
Lateral Sonar value readout impossible.
1.
Position the eccentricity measurement lateral sonar correctly
before performing the measurement.
2.
Check eccentricity lateral sonar connections.
3.
Check the power supplies on the power board.
4.
Replace the eccentricity lateral sonar.
5.
Make sure that the wheel does not stop before completing at least
4/5 revolutions after the fi rst braking impulse.
6.
Replace the computer board.