3B Scientific Pohl's Torsion Pendulum User Manual
Page 4
4
5. Versuchsbeispiele
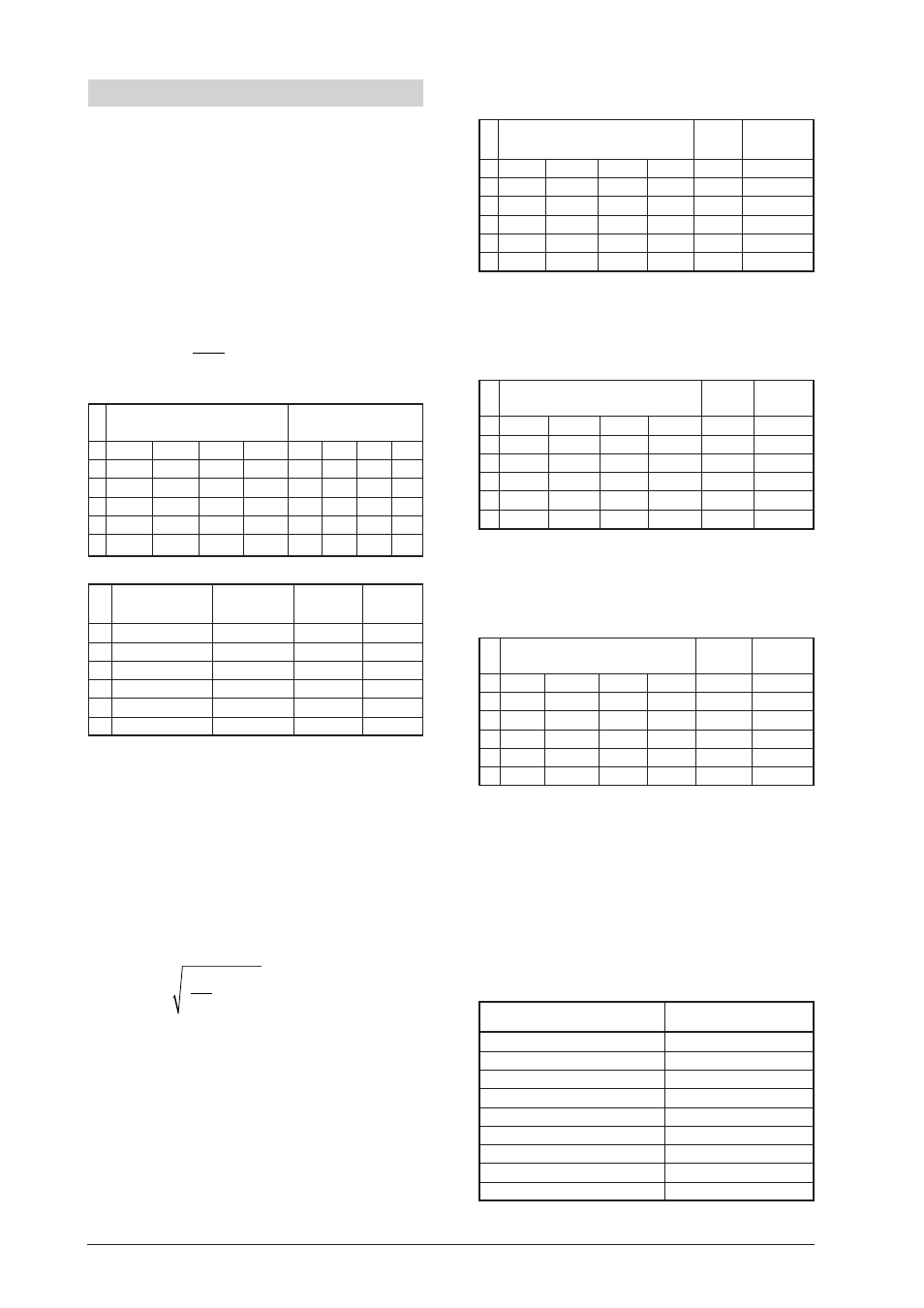
5.1 Freie gedämpfte Drehschwingung
• Zur Bestimmung des logarithmischen Dekrements
Λ werden die Amplituden in mehrfachen Durch-
läufen gemessen und gemittelt. Dazu werden in
zwei Messreihen die Ausschläge des Drehpendels
auf der Skala jeweils links und rechts abgelesen.
• Der Startpunkt des Pendelkörpers lag bei 15 bzw.
–15 auf der Skala. Fünf Ausschläge wurden abgele-
sen.
• Aus dem Verhältnis der Amplituden ergibt sich Λ
nach der Formel
Λ =
In
ϕ
ϕ
n
n+1
n
ϕ
–
ϕ
+
0 –15
–15
–15
–15
15
15
15
15
1 –14,8 –14,8 –14,8 –14,8 14,8 14,8 14,8 14,8
2 –14,4 –14,6 –14,4 –14,6 14,4 14,4 14,6 14,4
3 –14,2 –14,4 –14,0 –14,2 14,0 14,2 14,2 14,0
4 –13,8 –14,0 –13,6 –14,0 13,8 13,8 14,0 13,8
5 –13,6 –13,8 –13,4 –13,6 13,4 13,4 13,6 13,6
n
Ø
ϕ
–
Ø
ϕ
+
Λ –
Λ +
0
–15
15
1
–14,8
14,8
0,013
0,013
2
–14,5
14,5
0,02
0,02
3
–14,2
14,1
0,021
0,028
4
–13,8
13,8
0,028
0,022
5
–13,6
13,5
0,015
0,022
• Der gemittelte Wert für Λ beträgt Λ = 0,0202.
• Für die Schwingungsdauer T des Pendels gilt
t = n · T. Dazu die Zeit für 10 Schwingungen mit
einer Stoppuhr messen und T berechnen.
T = 1,9 s
• Aus diesen Werten lässt sich die Dämpfungs-
konstante
δ mit δ = Λ / T bestimmen.
δ = 0,0106 s
–1
• Für die Eigenfrequenz ω gilt
ω
π
δ
=
−
2
T
2
2
ω = 3,307 Hz
5.2 Freie gedämpfte Drehschwingung
• Zur Bestimmung der Dämpfungskonstante δ in Ab-
hängigkeit vom Strom
Ι durch den Elektromagne-
ten wurde der gleiche Versuch mit zugeschalteter
Wirbelstrombremse bei
Ι = 0,2 A, 0,4 A und 0,6 A
durchgeführt.
ΙΙΙΙΙ = 0,2 A
n
ϕ
–
Ø
ϕ
–
Λ –
0 –15
–15
–15
–15
–15
1 –13,6
–13,8
–13,8
–13,6 –13,7
0,0906
2 –12,6
–12,8
–12,6
–12,4 –12,6
0,13
3 –11,4
–11,8
–11,6
–11,4 –11,5
0,0913
4 –10,4
–10,6
–10,4
–10,4 –10,5
0,0909
5 9,2
–9,6
–9,6
–9,6 –9,5
0,1
• Bei T = 1,9 s und gemitteltem Λ = 0,1006 ergibt
sich die Dämpfungskonstante:
δ = 0,053 s
–1
ΙΙΙΙΙ = 0,4 A
n
ϕ
–
Ø
ϕ
–
Λ –
0
–15
–15
–15
–15
–15
1 –11,8 –11,8
–11,6 –11,6
–11,7 0,248
2 –9,2
–9,0
–9,0
–9,2
–9,1
0,25
3 –7,2
–7,2
–7,0
–7,0
–7,1 0,248
4 –5,8
–5,6
–5,4
–5,2
–5,5
0,25
5 –4,2
–4,2
–4,0
–4,0
–4,1
0,29
• Bei T = 1,9 s und gemitteltem Λ = 0,257 ergibt sich
die Dämpfungskonstante:
δ = 0,135 s
–1
ΙΙΙΙΙ = 0,6 A
n
ϕ
–
Ø
ϕ
–
Λ –
0
–15
–15
–15
–15
–15
1
–9,2
–9,4
–9,2
–9,2
–9,3
0,478
2
–5,4
–5,2
–5,6
–5,8
–5,5
0,525
3
–3,2
–3,2
–3,2
–3,4
–3,3
0,51
4
–1,6
–1,8
–1,8
–1,8
–1,8
0,606
5
–0,8
–0,8
–0,8
–0,8
–0,8
0,81
• Bei T = 1,9 s und gemitteltem Λ = 0,5858 ergibt
sich die Dämpfungskonstante:
δ = 0,308 s
–1
5.3 Erzwungene Drehschwingung
• Zur Bestimmung der Schwingungsamplitude in Ab-
hängigkeit der Erregerfrequenz bzw. der Ver-
sorgungsspannung wird der maximale Ausschlag
des Pendelkörpers abgelesen.
T = 1,9 s
Motorspannung V
ϕ
3
0,8
4
1,1
5
1,2
6
1,6
7
3,3
7,6
20,0
8
16,8
9
1,6
10
1,1