20 monitor window i/o display – IAI America SEP-PT User Manual
Page 26
20
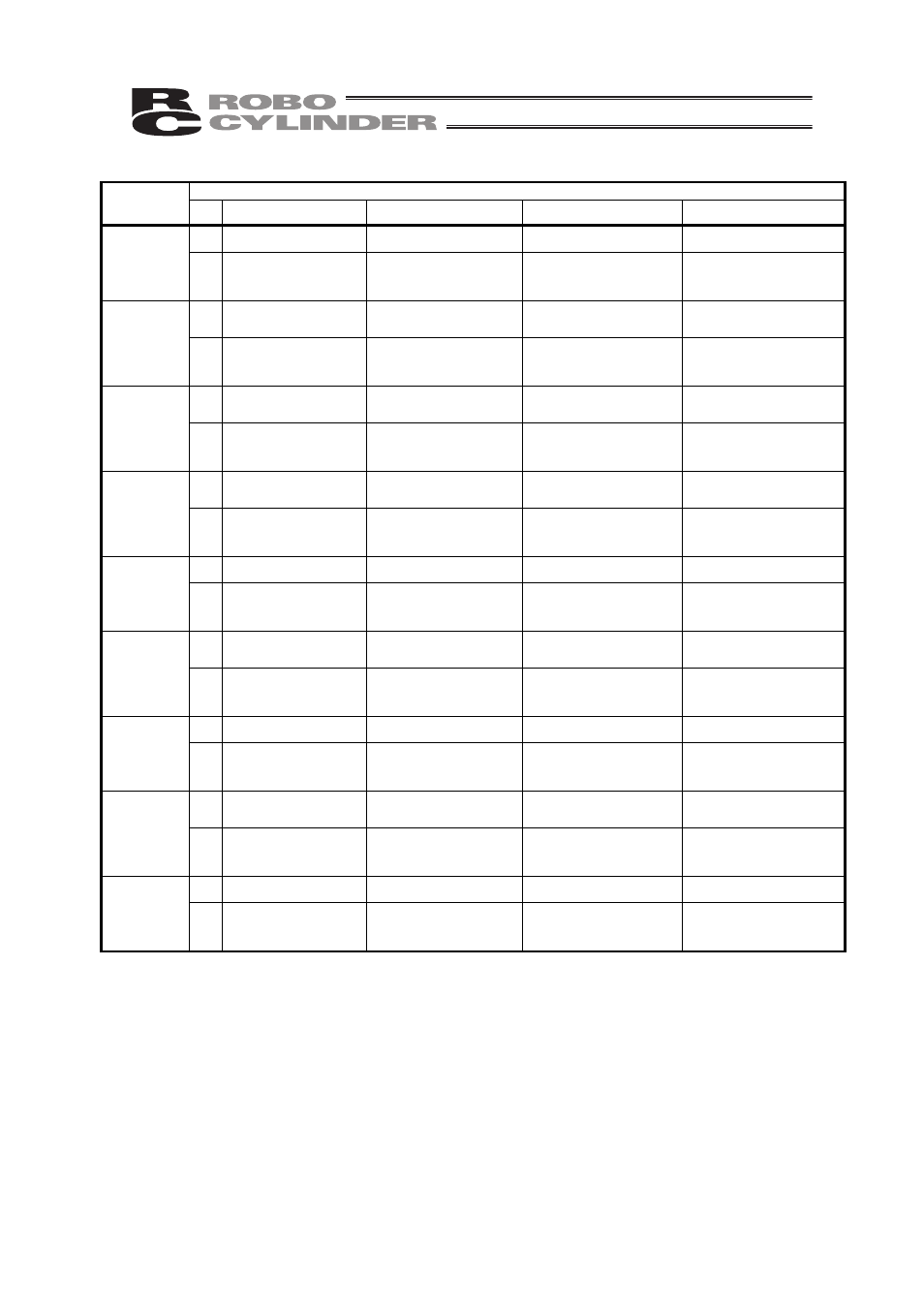
Monitor Window I/O Display
Display Description
PIO Pattern
Operation Mode
IN3(Input)
OUT3(Output) IN2(Input)OUT2(Output) IN1(Input)OUT1(Output) IN0(Input)OUT0(Output)
Input
ʊ/
SON(Servo ON signal)
*1
ʊ
(RES(Reset signal))
*STP(Pause Signal)
ST0(Movement Signal)
Standard
Point-to-Point
Movement:0
Single Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
ʊ
(RES(Reset signal))
ST1(Forward Position Movement
Signal)
(ʊ)
ST0(Backward Position Movement
Signal)
Standard
Point-to-Point
Movement:0
Double Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
SPDC(Movement Speed Change
Signal)
(RES(Reset signal))
*STP(Pause Signal)
ST0(Backward Position Movement
Signal)
Movement Speed
Setting:1
Single Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
SPDC(Movement Speed Change
Signal)
(RES(Reset signal))
ST1(Forward Position Movement
Signal)
(ʊ)
ST0(Backward Position Movement
Signal)
Movement Speed
Setting:1
Double Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
CN1(Target Position Change Signal)
(RES(Reset signal))
*STP(Pause Signal)
ST0(Backward Position Movement
Signal)
Position Data
Change:2
Single Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
CN1(Target Position Change Signal)
(RES(Reset signal))
ST1(Forward Position Movement
Signal)
(ʊ)
ST0(Backward Position Movement
Signal)
Position Data
Change:2
Double Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
ʊ
(RES(Reset signal))
ST1(Forward Position Movement
Signal)
ST0(Movement Signal 1)
2-Input, 3-Point
Movement:3
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
LS2(Intermediate Point Detection
Signal)/
PE2(Intermediate Point Positioning
Completion Signal)
*2
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
ST2(Position Movement 2)
(RES(Reset signal))
ST1(Forward Position Movement
Signal)
(ʊ)
ST0(Backward Position Movement
Signal)
3-Input, 3-Point
Movement:4
Double Solenoid
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
LS2(Intermediate Point Detection
Signal)/
PE2(Intermediate Point Positioning
Completion Signal)
*2
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
Input
ʊ/
SON(Servo ON signal)
*1
ʊ
(RES(Reset signal))
*STP(Pause Signal)
ASTR(Continuous Reciprocating
Operation Signal)
Continuous
Reciprocating
Operation:5
Output
*ALM (Alarm Output Signal)/
SV (Servo-Motor ON Output
Signal)
*3
HEND(Homing Completion Signal)/
SV(Servo-Motor ON Output Signal)
*3
LS1(Forward Position Detection
Signal)/
PE1(Forward Point Positioning
Completion Signal)
*2
LS0(Backward Position Detection
Signal)/
PE0(Backward Point Positioning
Completion Signal)
*2
The (Signal Name) section shows the signal before the home return operation.
1 When the Servo-Motor Control is set to “Enable” in the Initial Setting in the I/O Setting, the
“SON” signal is output.
2 When the Output Signal Type is set to “Limit Switch” in the Initial Setting in the I/O Setting, the
“LS” signal is output. When it is set to “Positioning”, the “PE” signal is output.
3 When “SV” is selected in the Output Selection, the “SV” signal is output. Depending on the
operation parameters and operation mode, the signal can be set either to OUT2 or OUT3.