Programming 5 - 6, B1-03 stopping method – Yaskawa P7 Drive User Manual User Manual
Page 90
Programming 5 - 6
b1-03 Stopping Method
There are four methods of stopping the Drive when the Run command is removed.
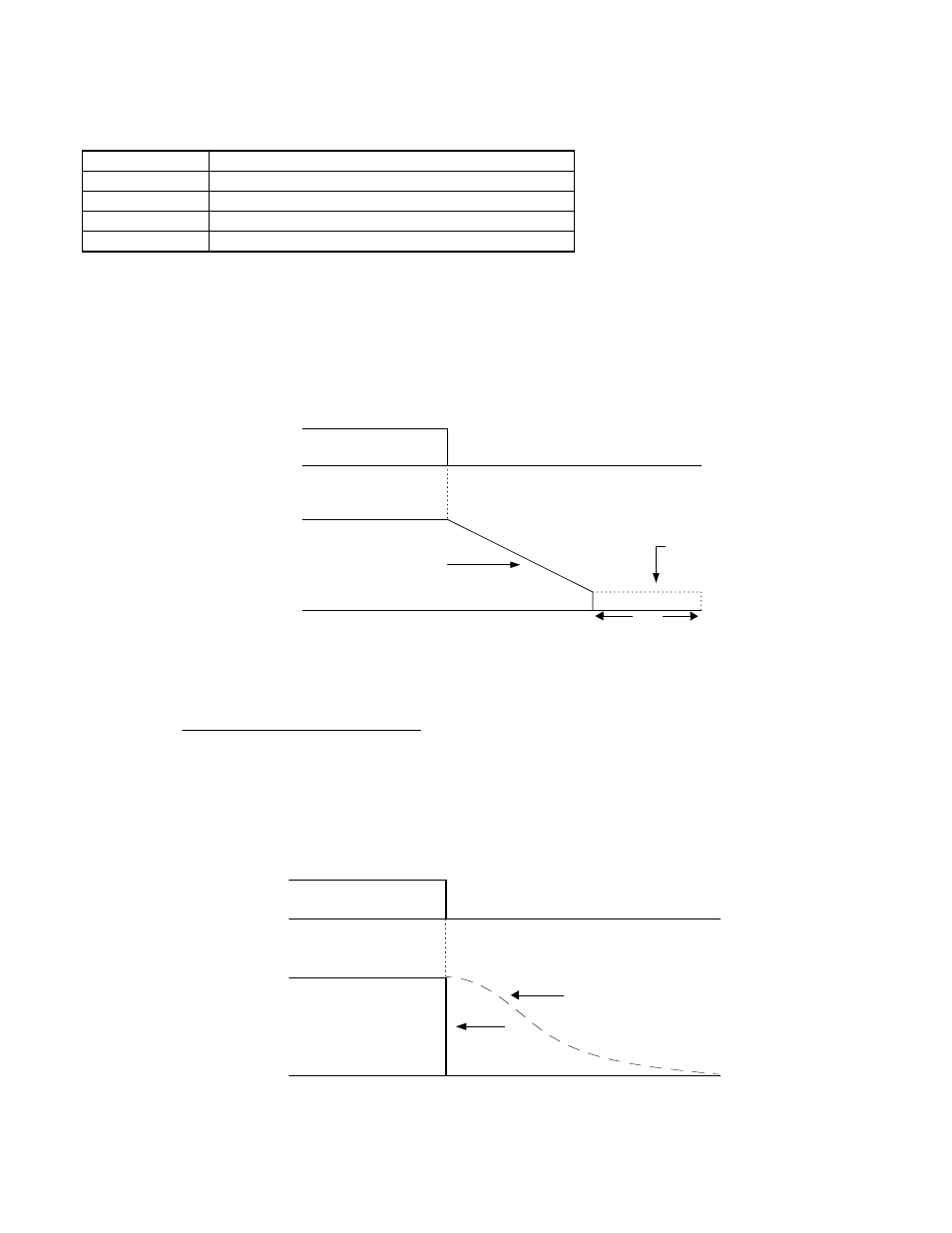
“0:Ramp to stop”: When the Run command is removed, the Drive will decelerate the motor to 0 rpm. The rate of
deceleration is determined by the active deceleration time. The factory default Decel Time is in parameter C1-02.
When the output frequency has dropped below the DC Injection Start Frequency in b2-01 (Default = 0.5HZ) DC current will
be injected in the motor at a level determined by b2-02 (50% Default). The DC Injection condition will occur for the time
specified by b2-04 (0.0 Default), to establish the end point of the ramp. DC injection can be used to insure the motor is at zero
rpm prior to the Drive shutting off.
Fig. 4 Deceleration to Stop
The actual deceleration time can be determined by the following formula
If S-Curve characteristics are specified by the Drive programming, they will add to the total time to stop.
“1:Coast to stop”: When the Run command is removed, the Drive will turn off its output and the motor will coast (uncon-
trolled deceleration). The friction of the driven equipment will eventually overcome any residual inertia of
the system and the rotation will stop.
Fig. 5 Coast to Stop
Setting
Description
0
Ramp to Stop (factory default)
1
Coast to Stop
2
DC Injection to Stop
3
Coast w/Timer
ON
OFF
Run Command
Output Frequency
Deceleration Time (C1-02)
DC Injection Brake
100 %
0 %
TIME
| b2-04 |
b2-01
(CLOSED)
(OPEN)
02)
-
(C1
Time
Decel
active
of
Setting
04)
-
(E1
Frequency
Maximum
command
stop
of
at time
Freq.
Output
Stop
to
Time
×
=
02 or C1-04)
ON
OFF
Run Command
Output Frequency
Drive Output Frequency Interrupted
100 %
0 %
TIME
Motor Speed
(CLOSED)
(OPEN)