Function block setup - quick reference, 2 operations, 3 drive – Yaskawa G5 Eliminator User Manual
Page 4
Date: 07/01/04, Rev: 04-07
Page 4 of 27
TM.G5SW.015
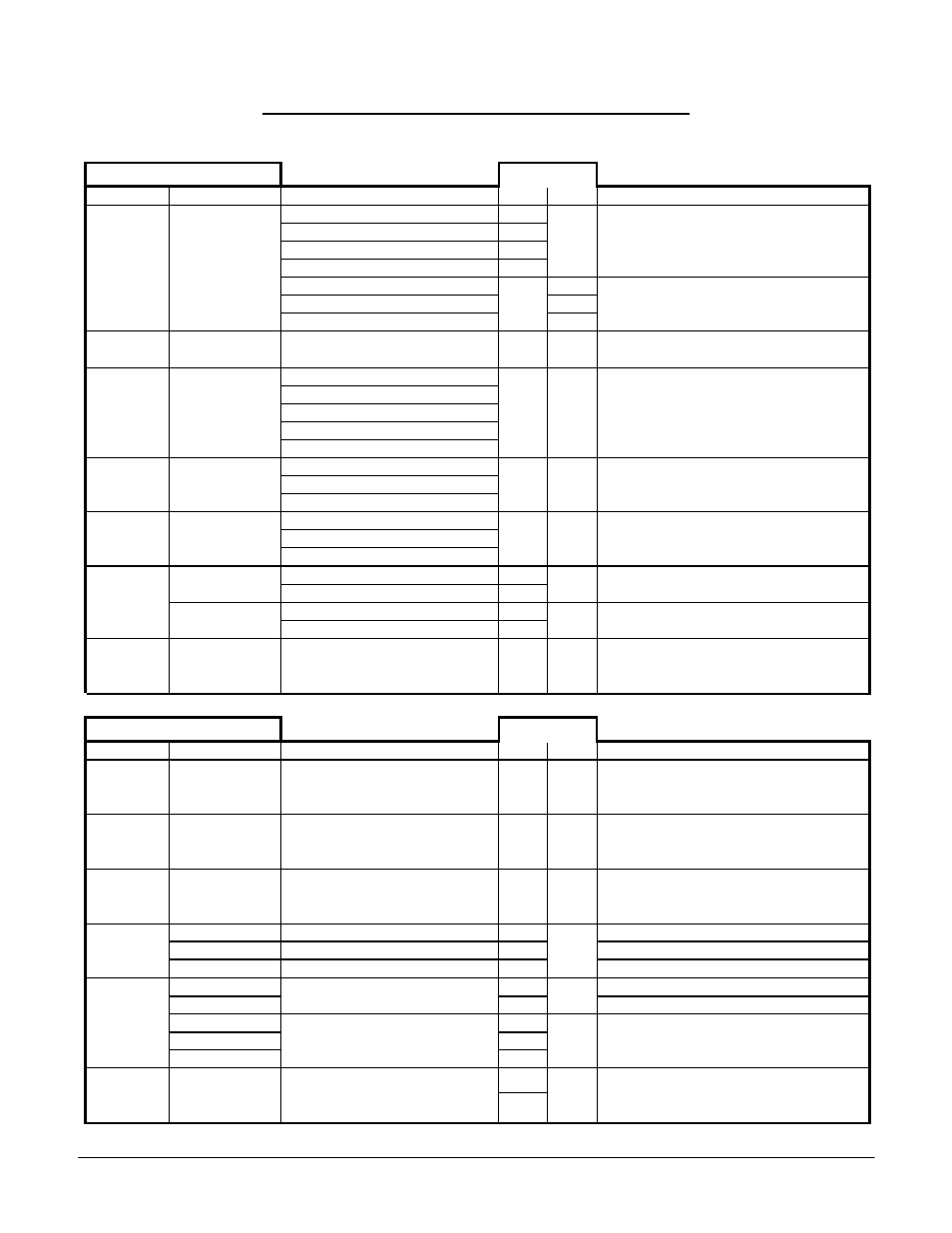
Function Block Setup - Quick Reference
Sheet 2 of 2
2.2 Operations
Connections
Figure
Description
Information
Input Output
Information / Equation
1
st
Value
70
Compared to 1
st
Value
71
Value if True
73
Value if False
72
Output less or equal
74
Output equal
75
2.2.2
Compare
Compare input 70
to input 71
Output greater or equal
76
70 <= 71 (True: 74 = 73) (False: 74 = 72)
70 = 71 (True: 75 = 73) (False: 75 = 72)
70 >= 71 (True: 76 = 73) (False: 76 = 72)
2.2.3
Space
Enter Spaces
Used to enter spaces into a
configuration
10
B5-02 PID Gain = P Gain
B5-03 PID I Time = I Bld Rate
B5-04 PID I Limit = I Limit
B5-05 PID D Time = D Rate
2.2.4
PID
PID
23 = Error input
B5-06 PID Limit = Output Limit
23
24
B5-01 PID Mode = Disabled
P1-08 = Scale Multiplier
P1-09 = Scale Divisor
2.2.5
Scale
Scale
P1-10 = Scale Bias
60
61
((60 X P1-08) / P1-09) + P1-10 = 61
Line Speed Ref input
20
Diameter Filter Output
2.2.6
Center
Winder
Calculate Diameter
with ratio output
Motor Speed Ref input
21
22
P1-06 = Diameter Filter Time
P1-07 = Diameter Build Ratio
Normally Open
01
Switch 1
Normally Closed
02
03
Terminal ? - H1-01 to 06 = 80: Switch 1 DI
Normally Open
04
2.2.7
Internal
Switches
Switch 2
Normally Closed
05
06
Terminal ? - H1-01 to 06 = 81: Switch 2 DI
2.2.8
Number
Hold
Hold last input
value
Outputs input value until the Hold is
activated causing it to hold the last
value read..
42
43
Terminal ? - H1-01 to 06 = 85: Number Hold
2.3 Drive
Connections
Figure
Description
Information
Input Output
Information / Equation
2.3.1
Drive
Speed
Frequency
Reference to Drive
Controls the drives output frequency
Range 0 to +/- 10000
ff
E1-04: Max Frequency Limits the drive output
2.3.2
Drive Max
Torque
Torque Reference
Controls the Max output torque from
the drive. Flux vector control only.
Same as changing L7-01 and L7-02.
fe
P2-10 = Max Torque Ref (limit)
Sets Max torque limit L7-01: Fwd = L7-02: Rev
2.3.3
Accel /
Decel
Accel / Decel
Changes the acceleration and
deceleration time. Accel = Decel
19
Accel Time = (19 x C1-01) / 10000
Decel Time = (19 x C1-02) / 10000
Contact Output 9
Connects terminal 9 to 10
80
H2-01 = 40: CONNECTION 80
Trans Output 25
Sinks terminal 25 to 27
81
H2-02 = 41: CONNECTION 81
2.3.4
Drive
Outputs
Trans Output 26
Sinks terminal 26 to 27
82
H2-03 = 42: CONNECTION 82
Monitor 1 (U1-50)
90
H4-01 or H4-04 = 50: Case Monitor 1
Monitor 2 (U1-51)
Information can be passed to analog
output terminals 21 and 23
91
H4-01 or H4-04 = 51: Case Monitor 2
Monitor 3 (U1-52)
92
Monitor 4 (U1-53)
93
2.3.5
Analog /
Monitor
Outputs
Monitor 5 (U1-54)
94
Monitor Value = Input Value / 10
44
Number Write 1
2.3.6
Write
Memory
Write a value into
the Number Read
registers
Store numerical data into running
memory. Two registers provided.
45
Number Write 2