6 related parameters, 6related parameters – Yaskawa 1000 Series Drive Option - CANopen Installation User Manual
Page 21
YASKAWA ELECTRIC TOBP C730600 45B 1000-Series Option SI-S3 Installation Manual
21
6 Related Parameters
6
Related Parameters
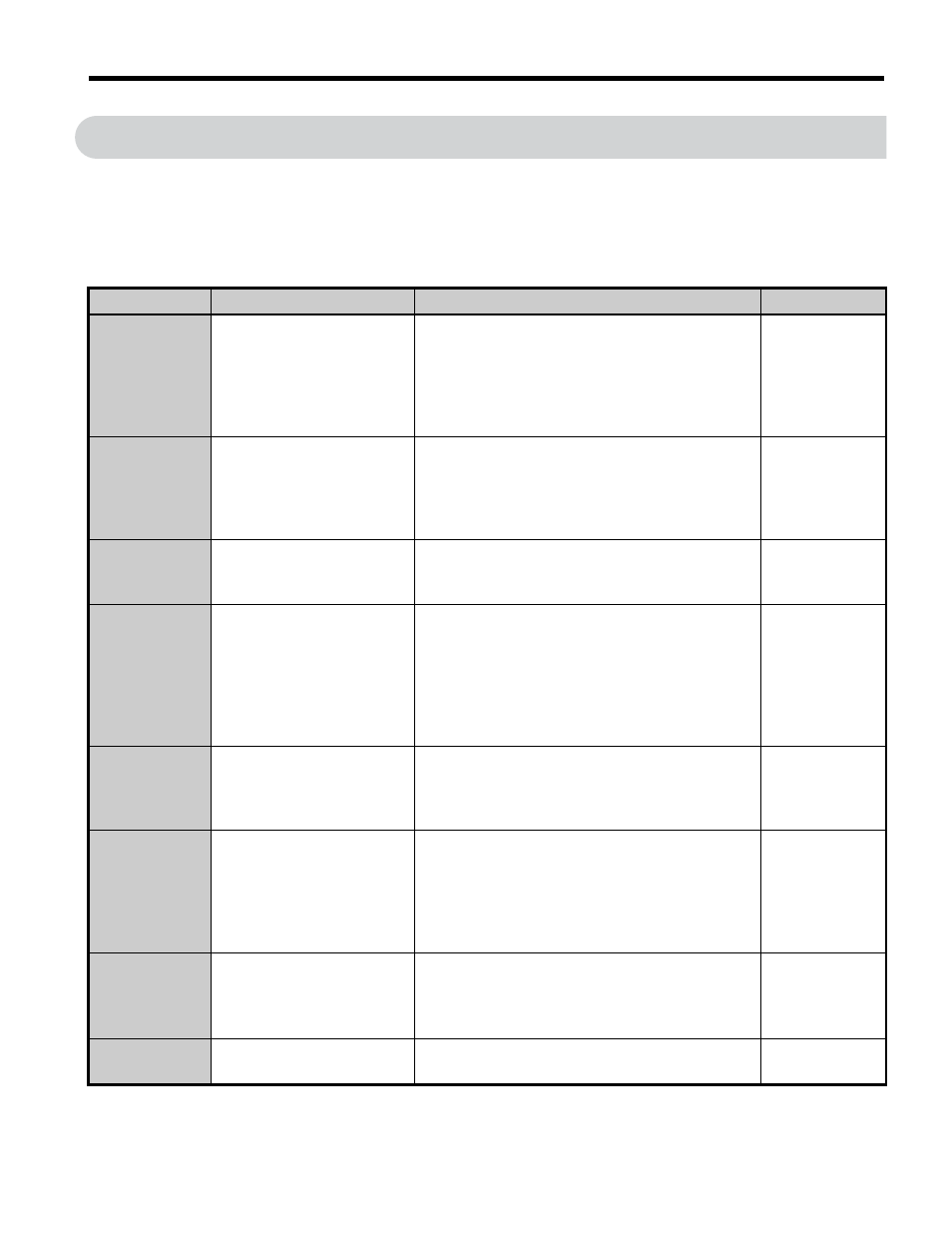
The following parameters are used to set up the drive for operation with the option.
Confirm proper setting of the all parameters in
before starting network
communications.
Table 4 Related Parameters
No.
Name
Description
Default
b1-01
Frequency Reference
Selection
Selects the frequency reference input source
0: Operator - Digital preset speed d1-01 to d1-17
1: Terminals - Analog input terminals
2: MEMOBUS/Modbus communications
3: Option card
4: Pulse Input (Terminal RP)
b1-02
Run Command Selection
Selects the run command input source
0: Digital Operator - RUN and STOP keys
1: Digital input terminals S
2: MEMOBUS/Modbus communications
3: Option card
1
E2-04
Motor 1 Motor Poles
Set the number of motor poles described on the
motor nameplate.
2 to 48
4
F6-01
Operation Selection after
Communications Error
Determines drive response when a bUS error is
detected during communications with the
CANopen Option
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
1
F6-02
External Fault Detection
Conditions (EF0)
Sets the condition for external fault detection
(EF0)
0: Always detected
1: Detected only during operation
0
F6-03
Stopping Method for
External Fault from
Communication Option
Board
Determines drive response for external fault input
(EF0) detection during CANopen communication
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
1
F6-06
Torque Reference/Torque
Limit selection from
Communications Option
0: Torque reference/torque limit via network
communications are disabled.
1:
Torque reference/torque limit via network
communications are enabled.
0
F6-07
NetRef/ComRef Selection
Function
0: Multi-step speed reference disabled (F7 mode)
1: Multi-step speed reference allowed (V7 mode)
0