4 advanced measurement and control parameters, 5 controller parameters, Advanced measurement and control parameters – Bronkhorst IQ+FLOW (till 01-07-2013) User Manual
Page 22: Controller parameters
9.17.045
page 22
4.1.4 Advanced measurement and control parameters
Measured Value (Fmeasure)
Type
Access
Range
FlowDDE FLOW-BUS Modbus
Float
R
-3.4E+38…3.4E+38
205
33/0
0xA100…0xA101/41217…41218
Floating point variable of the ‘Measured Value’. The ‘Fmeasure’ variable shows the measured value in the capacity and
capacity unit for which the instrument has been set. The ‘Fmeasure’ parameter is dependent of ‘Capacity’, ‘Capacity
Unit’, ‘Sensor Type’ and ‘Capacity 0%’.
Setpoint (Fsetpoint)
Type
Access
Range
FlowDDE FLOW-BUS Modbus
Float
RW
0…3.4E+38
206
33/1
0xA119…0xA11A/41241…41242
Floating point variable of the ‘Setpoint’. The ‘Fsetpoint’ variable shows the setpoint value in the capacity and capacity
unit for which the instrument has been set. The ‘Fsetpoint’ parameter is dependent of ‘Capacity’, ‘Capacity Unit’,
‘Sensor Type’ and ‘Capacity 0%’.
Valve Output
Type
Access
Range
FlowDDE
FLOW-BUS Modbus
Unsigned long
RW
0…16777215 55
114/1
0x001F/32
This parameter is the signal coming out of the controller, used for driving the valve. 0…16777215 corresponds with
approximately 0…60 mAdc.
4.1.5 Controller parameters
The controlling algorithm for the valve handled by the micro-controller consists of several parameters which can be
set. Although many parameters could be accessed, Bronkhorst® advises not to change these parameters because
during manufacturing the controller is optimized. Changing of controller settings should be performed by or under
supervision from trained service personnel only.
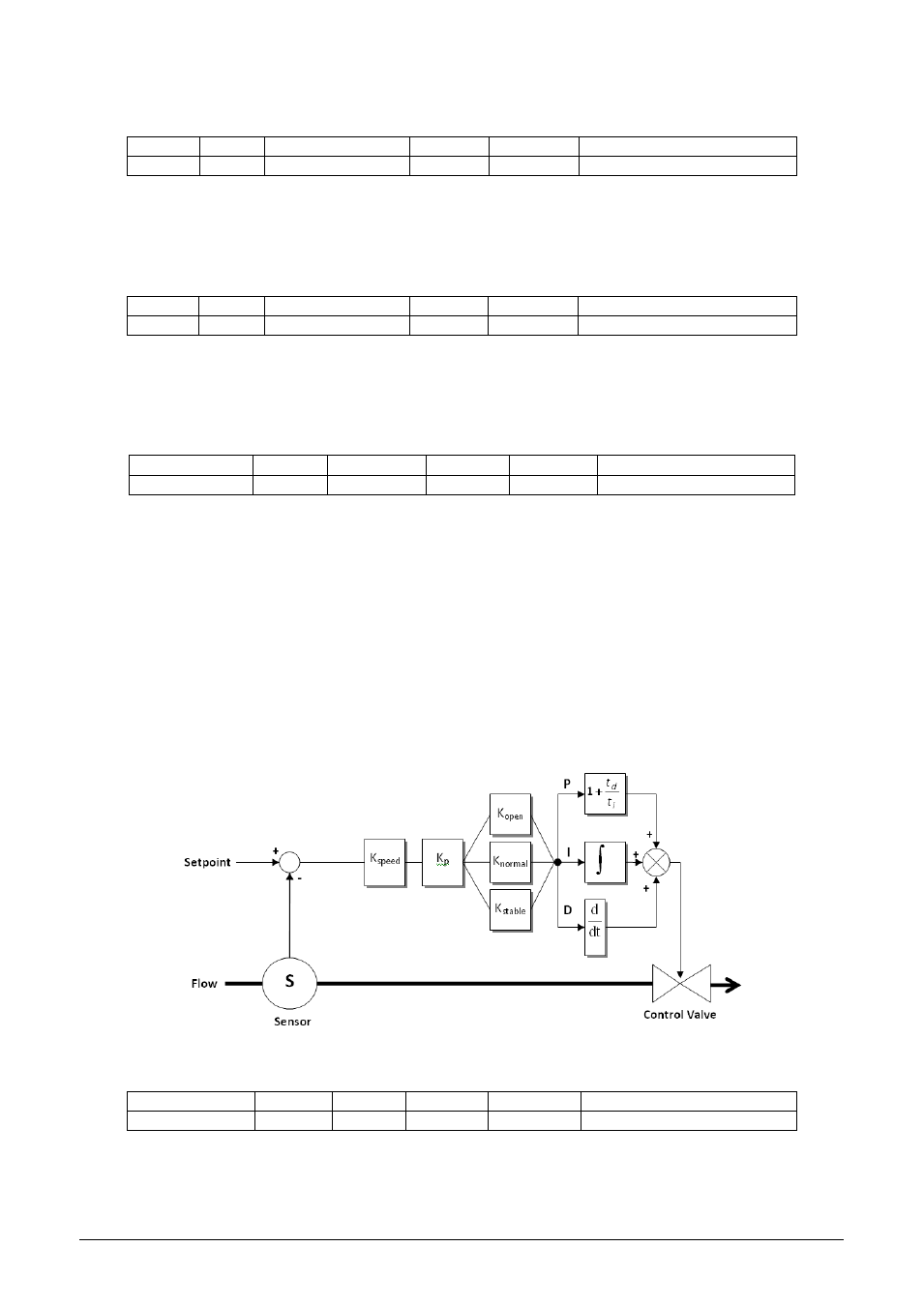
The picture below shows the basic controller diagram of the digital instrument. It consists of a standard PID controller
with a number of add-ons. Basically, when a faster or slower controller response is needed, only the controller speed
(Kspeed) or PID-Kp should be changed.
Kp (PID-Kp)
Type
Access
Range
FlowDDE
FLOW-BUS
Modbus
Float
RW
0…1E+10 167
114/21
0xF2A8…0xF2A9/62121…62122
PID controller proportional action, multiplication factor.