05 * response old response new, 10 s, Filter) exp. sensor (1 filter exp. sensor x y – Bronkhorst Multibus User Manual
Page 24
BRONKHORST
®
Page 24
Operational instructions for digital multibus instruments
9.17.023
5.6 N
ORMAL
S
TEP RESPONSE
unsigned char
0…255
RW
Y
72
114/5
Controller response during normal control (K
normal
,
Kp multiplication factor at setpoint step)
Step)
Normal
(128
1.05
*
response
old
response
New
−
=
5.7 S
TABLE RESPONSE
unsigned char
0…255
RW
Y
141
114/17
Controller response when controller is stable (K
stable
,
Kp multiplication factor within band of 2%)
response)
Stable
(128
1.05
*
response
old
response
New
−
=
5.8 S
ENSOR DIFFERENTIATOR
U
P
float
0…1E+10
RW
Y
51
1/12
Sensor time constant (upwards).
5.9 S
ENSOR DIFFERENTIATOR
D
OWN
float
0…1E+10
RW
Y
50
1/11
Sensor time constant (downwards).
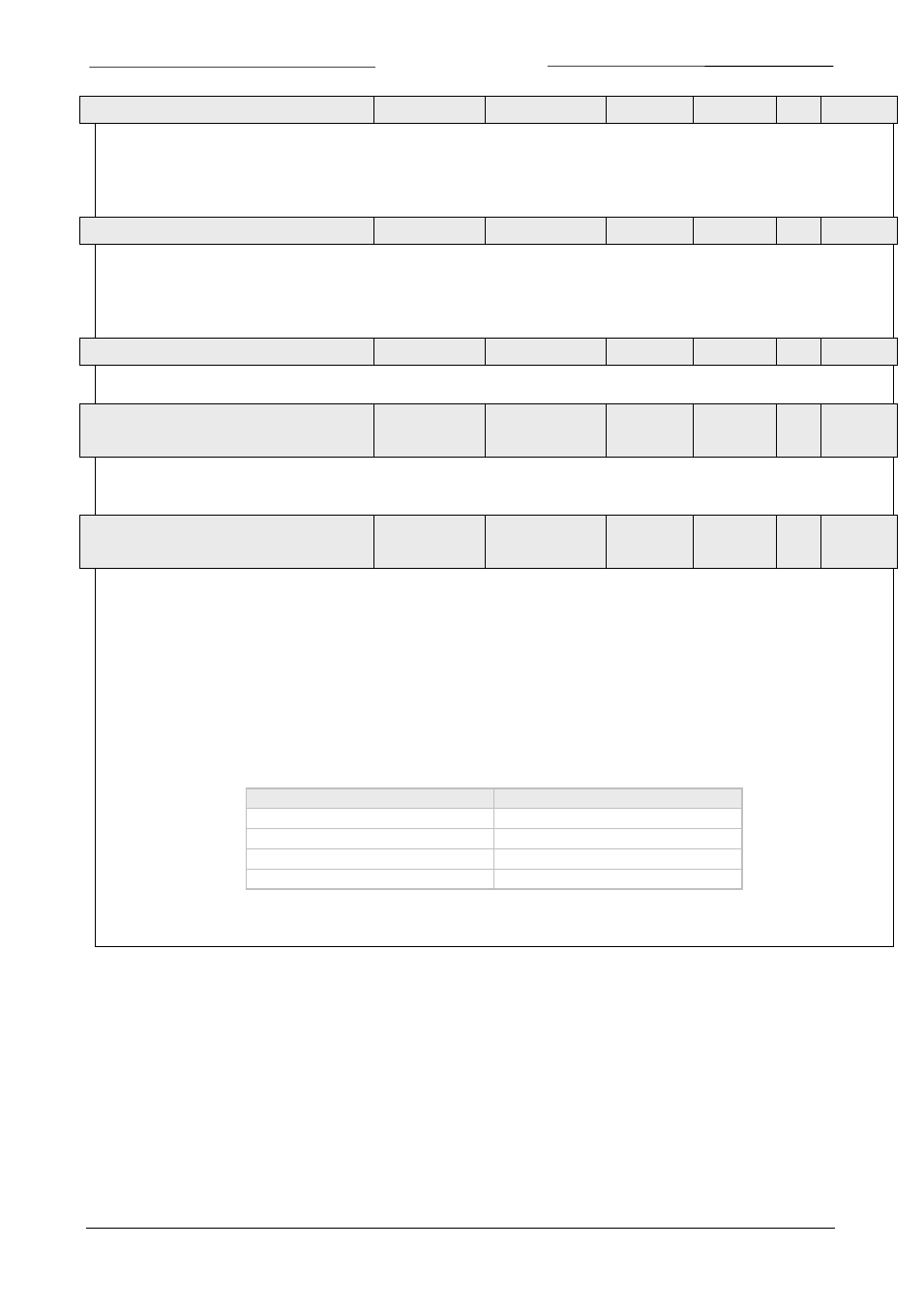
5.10 S
ENSOR EXPONENTIAL
SMOOTHING FILTER
float
0…1
RW
Y
74
117/4
This factor is used for filtering the signal coming from the sensor circuitry before it is further processed.
It filters according the following formula:
filter)
exp.
Sensor
(1
filter
exp.
Sensor
x
Y
0
0
−
•
+
•
=
1
y
For EL-FLOW types of instruments it will be the “slow” (not differentiated), non-linearized sensor signal. Only in case of a
noisy sensor signal this value will have another value than 1.0. Advise: do not give a value much lower than 0.8, otherwise it
would slow down sensor response too much. Best setting: 1.0.
For (mini) CORI-FLOW instruments it will influence the amount of averaging of the “bare” values. The smaller this value
gets, the slower a (mini) CORI-FLOW instrument will get a sensor signal, but less noise will be on the signal.
Response
Factor setting
Slow
0.05
Normal
0.1
Fast
0.2
Very fast
0.5...1.0 (not advised)
This filter is in the control loop so it affects the response time.