Software configuration, 1 introduction – Adept SmartMotion User Manual
Page 43
Adept SmartMotion Installation Guide, Rev. C
43
Software Configuration
3
3.1
Introduction
After the Adept SmartMotion system hardware has been installed (see
), and
the wiring completed, you will be ready to start the software configuration process. This
chapter provides an overview of this process.
For complete information on the process, refer to the
Adept SmartMotion Developer’s
Guide
which can be obtained by searching the Adept Documentation Library (formerly
Knowledge Express) available from the following sources:
• Adept Documentation Library CD-ROM that was shipped with your system
• V
+
Software CD MANUALS directory
• Adept website
)
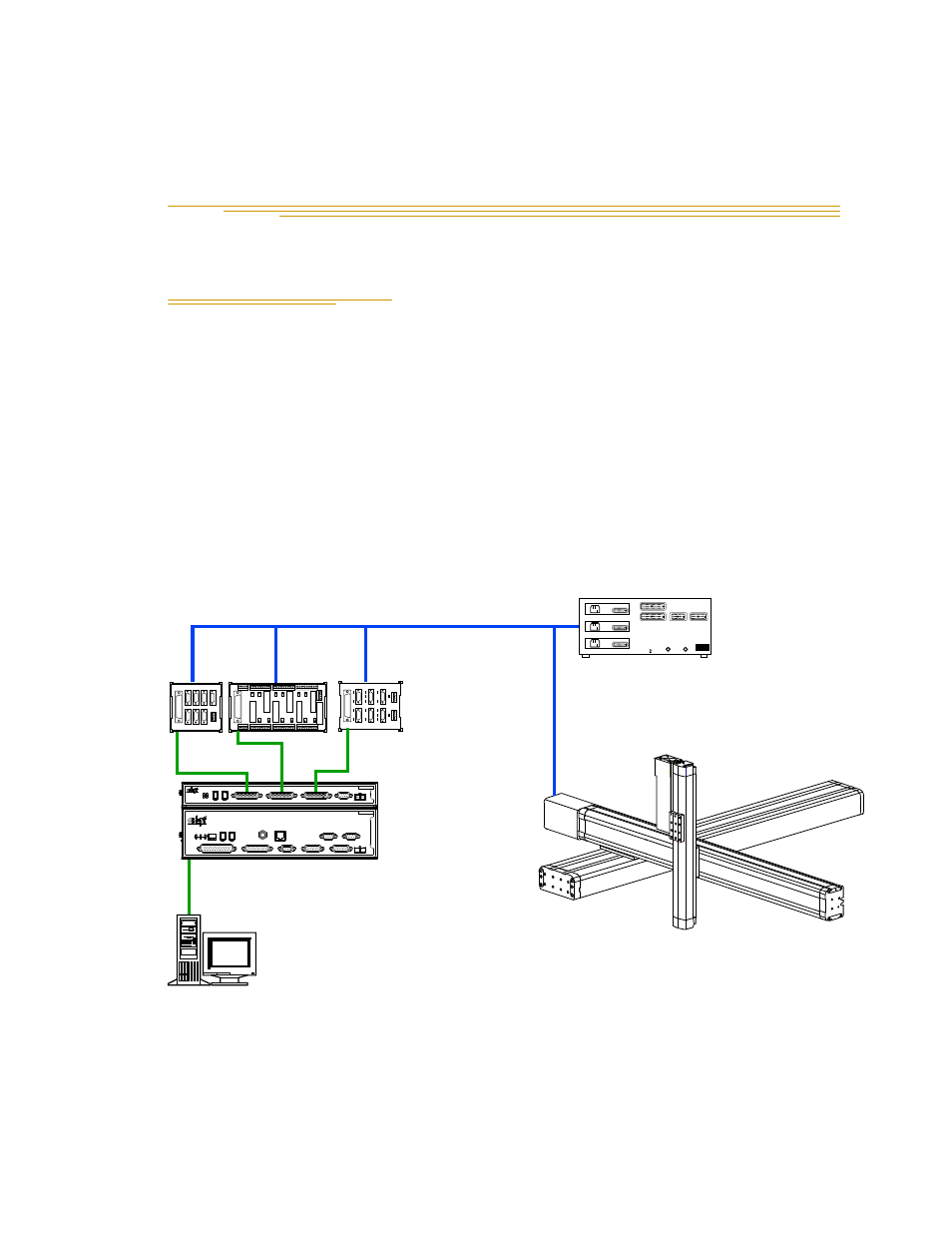
Figure 3-1. SmartMotion System Installed to Control a User Mechanism
Motion-interface Panel - SERVO (MP6-S)
S
E
R
V
O
CHAN2
CHAN1
CHAN4
CHAN3
CHAN6
CHAN5
ANALOG
PWR
SPARE
P1
Motion-interface Panel - ENCODER (MP6-E)
E
N
C
O
D
E
R
CHAN2
CHAN1
CHAN4
CHAN3
CHAN6 RESVD
CHAN5
ENC PWR
P1
M
A
C
H
I
N
E
HPE
P1
CHAN1
CHAN2
CHAN3
CHAN4
SPARE
CHAN5
CHAN6
LOGIC
PWR
BRAKE-BR1
BRAKE-BR2
BRAKE-BR3
BRAKE-BR4
BRAKE-BR5
BRAKE-BR6
HIGH
POWER
ENABLE-HPE
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
HOME
OVERTRAVEL
1
2
3
RS-422/485
XUSR
XSYS
SF
XMCP
1.1
SmartController
CS
LAN
HPE
OFF
24V
5A
ON
RS-232/TERM
XFP
HD
ES
XDIO
Eth 10/100
*S/N 3561-XXXXX*
SW1
Device Net
SmartServo
XDC1 XDC2
- +
- +
1 2 3 4
OK
R
1.2
MP6-E
MP6-M
MP6-S
User Amplifier
User Mechanism
SmartController
Desktop or Laptop PC
24V
R
F2 DE2
F6 DE6
F1 DE1
ES HPE
STATUS
F5 DE5
F4 DE4
F3 DE3
-+
-+
s
XMACHINE
XENCODER
MI6
*S/N 3564-XXXXX*
SmartServo
XSERVO
1.1
1.2
XANL
XDC1 XDC2
0.5A
sMI6 Module
3-CN5
3-CN6
MOTOR 3
SENSOR 3
2-CN5
2-CN6
MOTOR 3
SENSOR 3
1-CN5
1-CN6
MOTOR 3
SENSOR 3
CN7
CN2
CN3
CN4
GENERAL IO
PULSE OUT
CONTROL IO
F1
F2
P.G.
-
- F.G.