111b111b111bvg440 advanced settings, Setting, Default value – Moog Crossbow NAV440 Series User Manual
Page 26: Comments, Nced settings, Table 6 vg440 advanced settings
Page 26
NAV440 User Manual
7430‐0131‐01 Rev. F
In addition to the scaled sensor packets described in the IMU440 section, the VG440 has additional measurement
output packets including the default A2 Angle Packet which outputs the roll angle, pitch angle, and digital IMU440
data. N0 and N1 packets are also available for use with an external GPS receiver. Refer to Chapter 9. Communicating
with the 440and Chapter 10. Guidelines for full packet descriptions.
VG440 Advanced Settings
In addition to the configurable baud rate, packet rate, axis orientation, and sensor low‐pass filter settings, VG440
provides additional advanced settings that are selectable for tailoring the unit to a specific application requirements.
he settings are listed in
below.
T
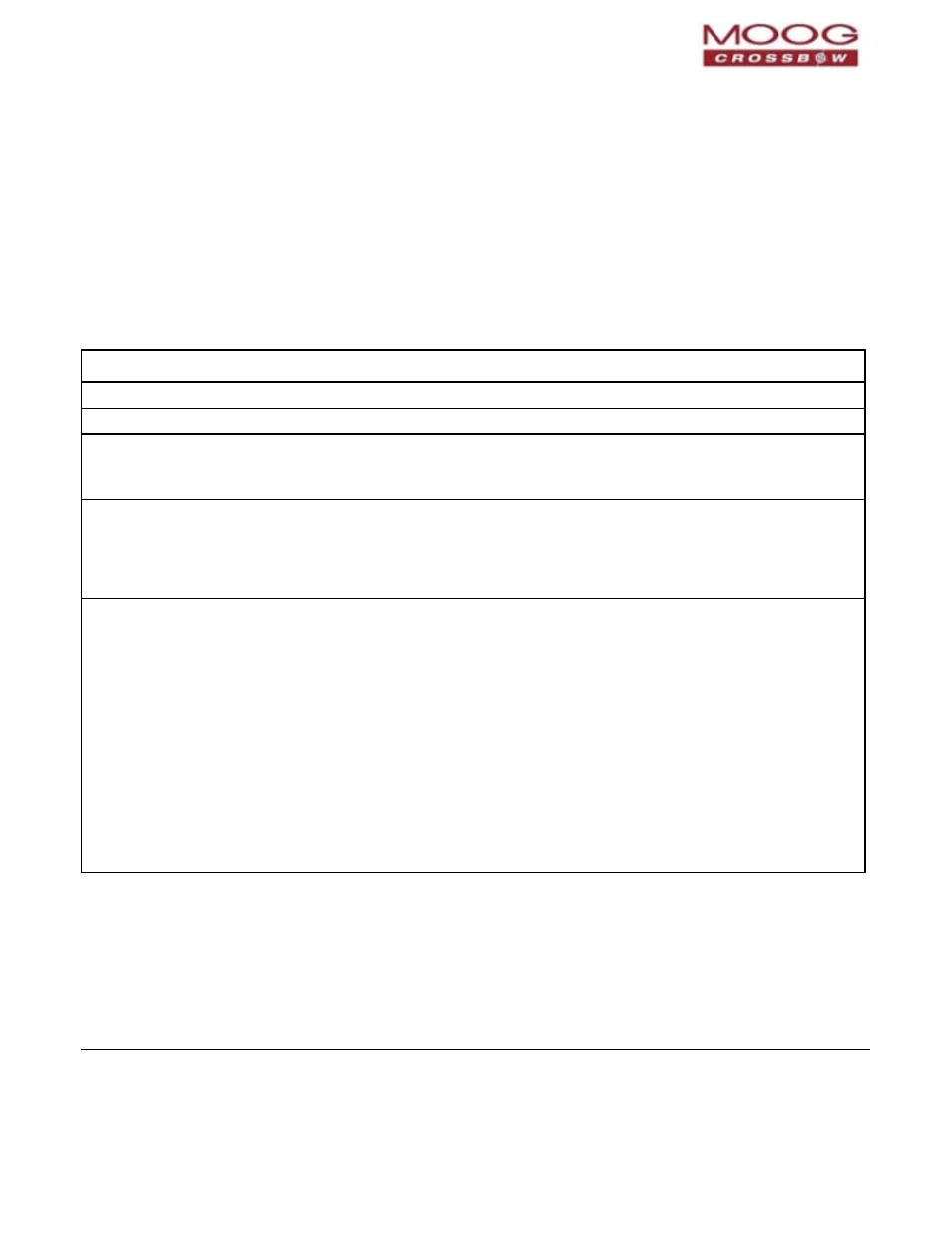
Table 6VG440 Advanced Settings
Setting
Default Value
Comments
Baud Rate
38,400 baud
9600, 19200, 57600 also available
Packet Type
A2
S1, S2, N0, N1 also available
Packet Rate
25Hz
This setting sets the rate at which selected Packet Type, packets are output.
If polled mode is desired, then select Quiet. If Quiet is selected, the unit will only
send measurement packets in response to GP commands.
Orientation
To configure the axis orientation, select the desired measurement for each axis:
NAV‐VIEW 2.2 will show the corresponding image of the unit, so it easy to
visualize the mode of operation. Refer to Orientation Field on page 84 for the
twenty four possible orientation settings. The default setting points the
connector AFT.
Freely
Integrate
OFF
The Freely Integrate setting allows configuring the unit into a free gyroscope. In
free gyroscope mode, the roll, pitch and yaw are computed exclusively from
angular rate with no Kalman filter based corrections of roll, pitch, or yaw. When
turned on, there is no coupling of acceleration based signals into the roll and
y with
pitch. As a result, the roll, pitch, and yaw outputs will drift roughly linearl
time due to sensor bias.
For best performance, the Freely Integrate mode should be used after the
algorithm has initialized. This allows the Kalman Filter to estimate the roll and
pitch
e
rate sensor bias prior to entering the free gyroscope mode. Exiting the fre
scope mode (OFF), causes one of the following behaviors to occur:
•
gyro
If the unit has been in freely integrate mode for less than sixty seconds, the
algorithm will resume operation at normal gain settings.
• If the unit has been in freely integrate mode for greater than sixty seconds,
the algorithm will force a reset and reinitialize with high gains automatically.