Ŏ3lwfkwr58'pl[lqj ,gohxs, Ŏ3lwfkwr58'pl[lqj +rog, Ŏ7kurwwohkrogfxuyhdgmxvwphqw – Futaba 12Z User Manual
Page 41: Ŏ3lwfkfxuyh 1rupdo, Ŏ3lwfkfxuyh ,gohxs, Ŏ3lwfkfxuyh +rog, Ŏ+rogsrvlwlrqvhwwlqj, Ŏ2wkhuvhwwlqjv
41
3LWFKWR58'PL[LQJVHWWLQJ
Use this function when you want to suppress
the torque generated by the changes in the pitch
and speed of the main rotor during pitch operation.
Adjust it so that the nose does not swing in the
rudder direction. However, when using a heading
hold gyro like those shown below, do not use Pitch
WR58'PL[LQJ
1RWH:KHQXVLQJD*<*<*
QRWEHXVHG7KHUHDFWLRQWRUTXHLVFRUUHFWHGDW
WKHJ\URVLGH:KHQRSHUDWLQJWKHJ\URLQWKH$9&6
PRGHWKHPL[HGVLJQDOZLOOFDXVHQHXWUDOGHYLDWLRQ
V\PSWRPVDQGWKHJ\URZLOOQRWRSHUDWHQRUPDOO\
&DOOWKH3LWFKWR58'PL[LQJIXQFWLRQIURPWKH
Model Menu, and set the curve for each condition.
$W LQLWLDO VHWWLQJ WKLV IXQFWLRQ LV LQ WKH ,1+
VWDWH7RXVHLWVHWLWWRWKH21VWDWH
(17 points curve)
Curve setting of up to 17 points is possible.
+RZHYHU LQ WKH IROORZLQJ VHWWLQJ H[DPSOH D
simple curve can be adjusted by using the [Linear]
curve type.
1RWH$WLQLWLDOVHWWLQJWKHVHWWLQJPRGHLVWKHJURXS
PRGH,QWKLVPRGHWKHVDPHFRQWHQWVDUHVHWDWLQ
DOOFRQGLWLRQV:KHQ\RXZDQWWRVHWWKHVHOHFWHG
FRQGLWLRQRQO\VZLWFKWRWKHVLQJOHPRGH
6HWWLQJH[DPSOH!
&DOOWKHPL[LQJFXUYHRIHDFKFRQGLWLRQZLWKWKH
condition select switch.
$FXUYHVHWWLQJH[DPSOHLVVKRZQEHORZ
ŏ3LWFKWR58'PL[LQJFXUYH1RUPDO
8VHWKHKRYHULQJV\VWHPDQGVHWWKLVFXUYHWR
PDWFKWDNHRIIDQGODQGLQJDQGYHUWLFDOFOLPEDW
DFRQVWDQWVSHHG
*For this curve, use the initial setting [Linear] curve type.
ŏ3LWFKWR58'PL[LQJ,GOHXS
8VHWKLVFXUYHLQºVWDOOWXUQORRSDQGUROOLQJ
VWDOOWXUQDQGDGMXVWLWVRWKHIXVHODJHLVIDFLQJ
VWUDLJKWDKHDGZKHQKHDGLQJLQWRWKHZLQG
*For this curve, [Linear] curve type can be used and the entire
curve can be lowered with the [Offset] function.
ŏ3LWFKWR58'PL[LQJ+ROG
7KLVIXQFWLRQLVVHWVRWKDWWKHIXVHODJHLVIDFLQJ
ﶴﷂﶬﶒﶰﶪ
ﴶﴸﴸﳜ
ﶺﶶﶼ
ﶸﶶﶰﶺﶼ
ﴶﴸﳰﴶﴸﳰﴸﴸ
<B8JR0
ﻤfﻞf
ﴌﴈﴞﴜ
ﴂﴤﳾﴜ
ﳌ
ﴤ
ﴂﴤﳾﴜ
ﳌ
ﴢ
ﻤfﻞf
ﻚﻚ
ﻤfﻞf
ﴈﴚﴚﴀﴜﳾ
ﻚﻚ
ﻤfﻞf
ﳶ
ﳌ
ﴈﴚﴚﴀﴜﳾ
ﳖﴶﴮﴸ
ﳖﴶﴸﴸ
ﳖﴮﴸ
ﴸ
ﳒﴮﴸ
ﳒﴶﴸﴸ
ﳒﴶﴮﴸ
ﴆﴈﴀ ﳒﴮﴨﳐﴸ
ﳖﴸﳐﴸ
ﴂﴤﳾﴜ
ﴤﴠﳾﳎﴔﴊﴖ
ﴘﴂﴈﳼﴆ
B8D
F06*4
ﶴﷂﶬﶒﶰﶪ
ﴶﴸﴸﳜ
ﶺﶶﶼ
ﶸﶶﶰﶺﶼ
ﴶﴸﳰﴶﴸﳰﴸﴸ
<B8JR0
ﻤfﻞf
ﴌﴈﴞﴜ
ﴂﴤﳾﴜ
ﳌ
ﴤ
ﴂﴤﳾﴜ
ﳌ
ﴢ
ﻤfﻞf
ﻚﻚ
ﻤfﻞf
ﴈﴚﴚﴀﴜﳾ
ﻚﻚ
ﻤfﻞf
ﳶ
ﳌ
ﴈﴚﴚﴀﴜﳾ
ﳖﴶﴮﴸ
ﳖﴶﴸﴸ
ﳖﴮﴸ
ﴸ
ﳒﴮﴸ
ﳒﴶﴸﴸ
ﳒﴶﴮﴸ
ﴆﴈﴀ ﳒﴮﴨﳐﴸ
ﳖﴸﳐﴸ
ﴂﴤﳾﴜ
ﴤﴠﳾﳎﴔﴊﴖ
ﴘﴂﴈﳼﴆ
B8D
F06*4
ŏ7KURWWOHKROGFXUYHDGMXVWPHQW
7KHWKURWWOHKROGFXUYHLVXVHGZKHQSHUIRUPLQJ
DXWRURWDWLRQGLYHV
&RQÀUPWKDWWKHUDWHRIWKHVORZHVWSRVLWLRQRI
WKHVWLFNLVLQLWLDOVHWWLQJ
%HVXUHWKDWZKHQVHWWRKLJKVLGHWKHFXUYH
RIDQ\FRQGLWLRQGRHVQRWH[FHHG
<([DPSOHRISLWFKFXUYHVHWWLQJ!
Call the pitch curve of each condition with the
condition select switch.
ŏ3LWFKFXUYH1RUPDO
0DNHWKHSLWFKDWKRYHULQJDSSUR[LPDWHO\ºaº
6HWWKHSLWFKDWKRYHULQJZLWKWKHVWLFNSRVLWLRQDW
WKHSRLQWDVWKHVWDQGDUG
*Stability at hovering may be connected to the throttle curve.
Adjustment is easy by using the hovering throttle function
and hovering pitch function together.
ŏ3LWFKFXUYH,GOHXS
7KHLGOHXSSLWFKFXUYHIXQFWLRQFUHDWHVDFXUYH
PDWFKHGWRDLUERUQHÁLJKW
6HWWRºaºDVVWDQGDUG
ŏ3LWFKFXUYH,GOHXS
7KHKLJKVLGHSLWFKVHWWLQJLVOHVVWKDQLGOHXS
7KHVWDQGDUGLVº
ŏ3LWFKFXUYH+ROG
$WDXWRURWDWLRQXVHWKHPD[LPXPSLWFKDWERWK
WKHKLJKDQGORZVLGHV
>3LWFKDQJOHVHWWLQJH[DPSOH@
7KURWWOHKROGºaº
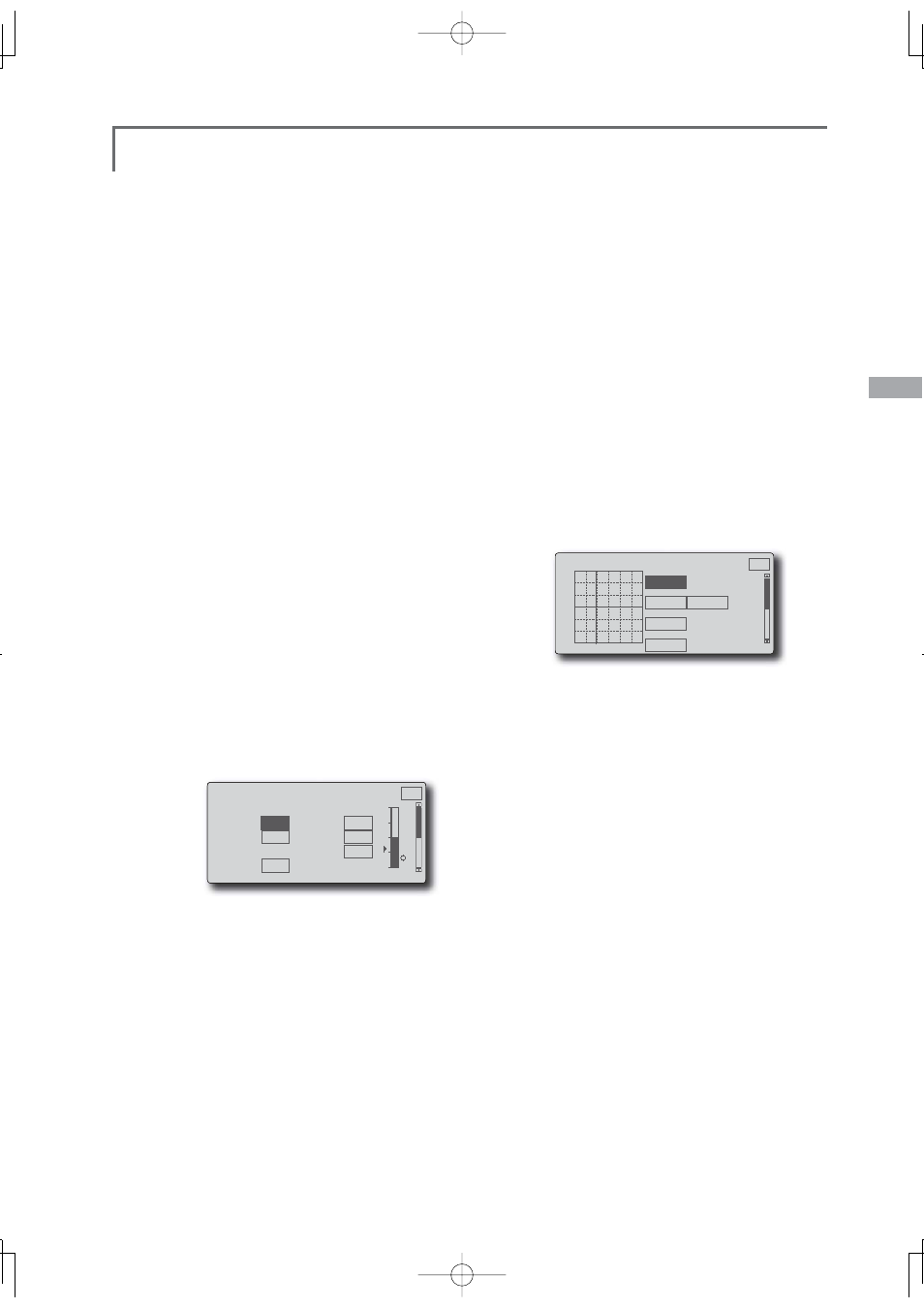
6. Throttle hold setting
Call the Throttle Hold function from the Model
Menu and switch to the throttle hold condition with
the condition select switch.
1RWH$WLQLWLDOVHWWLQJWKHVHWWLQJPRGHLVWKH
JURXSPRGH6LQFHWKLVIXQFWLRQLVQRWXVHGDWRWKHU
FRQGLWLRQVVZLWFKWRWKHVLQJOHPRGHEHIRUHVHWWLQJ
ŏ6HWWLQJ WR WKH VWDWH ZKLFK DFWLYDWHV WKH
IXQFWLRQ
7KHWKURWWOHKROGIXQFWLRQDOORZVVHWWLQJIRUWKURWWOH
FXWDQGVZLWFKLQJRIWKHIXQFWLRQÀ[HGDWWKHLGOH
SRVLWLRQE\VZLWFKIRUWUDLQLQJ(LWKHURQHRUERWK
IXQFWLRQVFDQEHSHUIRUPHG
ŏ+ROGSRVLWLRQVHWWLQJ
7KLVIXQFWLRQVHWVWKHVHUYRRSHUDWLRQSRVLWLRQDW
WKURWWOHKROG7KURWWOHFXWDQGLGOHSRVLWLRQV
ŏ2WKHUVHWWLQJV
:KHQ\RXZDQWWROLQNRSHUDWLRQZLWKVWLFN
PDQLSXODWLRQWKH$XWRPRGHFDQEHVHW
:KHQ\RXZDQWWRDGMXVWWKHVHUYRVSHHGDGMXVW
>6SHHG@
ﶬﷄﶰ
ﵺ
ﷄﶶﶼ
ﴶﴸﴸﳜ
ﶺﶶﶼ
ﶸﶶﶰﶺﶼ
ﴶﴸﳰﴶﴸﳰﴸﴸ
ﹼ﹘﹚
︨
﹨﹤ﹺﹸ
ﶬﵼﷂﶸﷄ
B8D
:R:<
ﶺﶶ
dXﻪ
ﴶﴸﴸﳜ
ﴸﳜ
ﷄﶶﶼ
ﵺ
ﶴﶶﶮ
ﷆﶰﶶﶪﶴ
ﶮﶦﷂﶬﷄ
ﶮﶴ
F04
8*<<
f
ﶬﷄﶰ
ﵺ
ﷄﶶﶼ
ﴶﴸﴸﳜ
ﶺﶶﶼ
ﶸﶶﶰﶺﶼ
ﴶﴸﳰﴶﴸﳰﴸﴸ
ﹼ﹘﹚
︨
﹨﹤ﹺﹸ
ﶬﵼﷂﶸﷄ
B8D
:R:<
ﶺﶶ
dXﻪ
ﴶﴸﴸﳜ
ﴸﳜ
ﷄﶶﶼ
ﵺ
ﶴﶶﶮ
ﷆﶰﶶﶪﶴ
ﶮﶦﷂﶬﷄ
ﶮﶴ
F04
8*<<
f