Pit to rud mixing (revolution mixing), Functions of model menu (helicopter functions), Normal condition mixing curve – Futaba 12Z User Manual
Page 117: Acceleration function setting
117
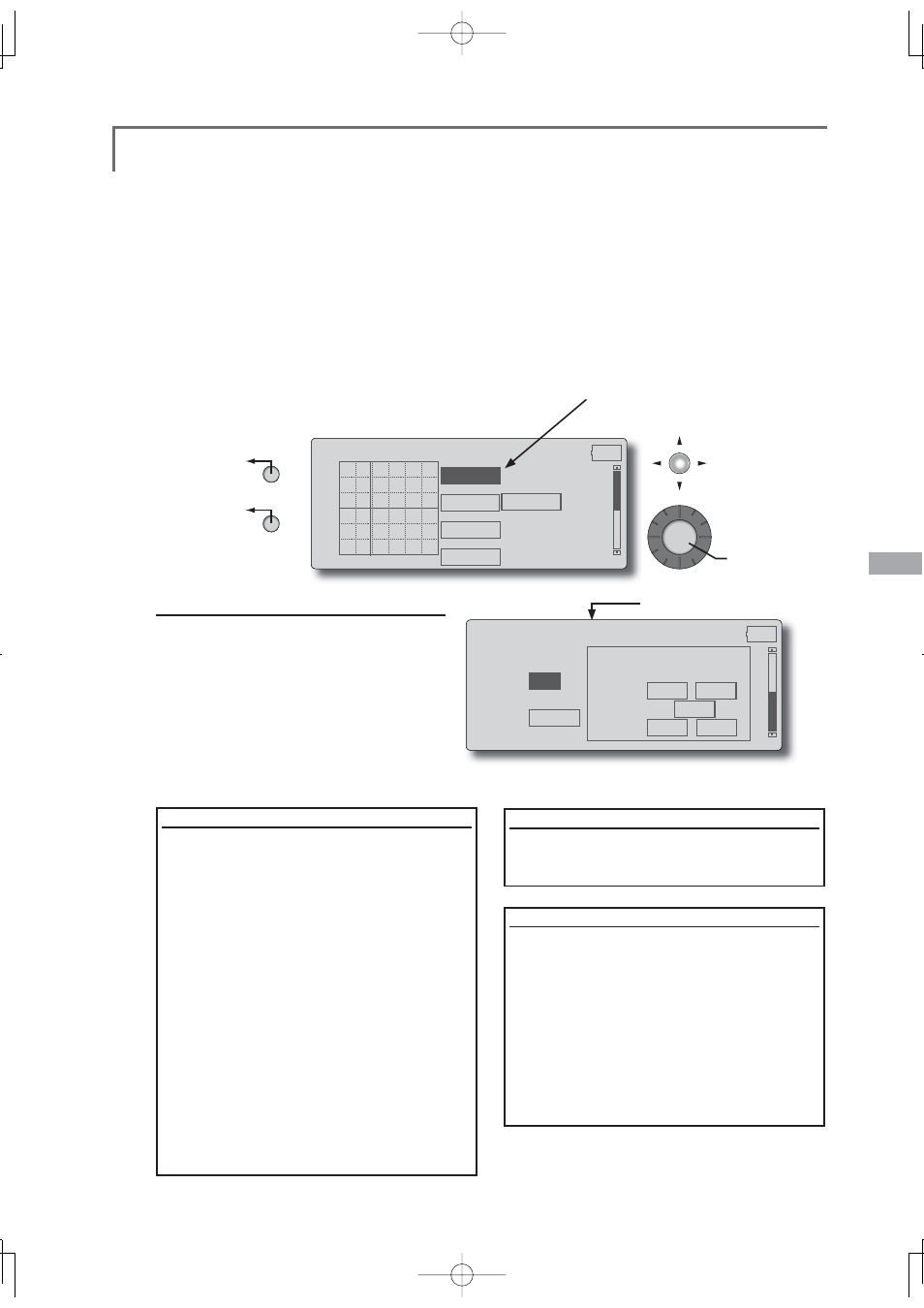
PUSH
[Cursor Lever]
Ɣ0RYHPHQWRQWKH
VFUHHQGLUHFWLRQV
Ɣ3XVKWKHOHYHUWRFDOO
QH[WSDJH
[Data Input Dial]
[Enter Button]
[Return Key]
Ɣ7RKRPH
VFUHHQ
Ɣ7RSUHFHGLQJ
VFUHHQ
PIT to RUD mixing (Revolution mixing)
Use this mix when you want to suppress the
reaction torque generated by main rotor pitch and
speed changes at pitch operation. Adjust so that the
nose does not move in the rudder direction.
An acceleration function which temporarily
increases the correction rate at throttle stick
acceleration/deceleration operation can be set. The
mixing rate at acceleration/deceleration can be set.
Setting method
ŏ :KHQ XVLQJ WKLV IXQFWLRQ PRYH WKH
FXUVRU WR WKH >$&7@ LWHP DQG WXUQ WKH
data input dial to the left and push the
HQWHUEXWWRQ21RU2))LVGLVSOD\HG
ŏ:KHQ\RXZDQWWRVHWWKHVDPHFRQWHQWVDW
RWKHU FRQGLWLRQV VHOHFW WKH JURXS PRGHO
*URXS
When you want to set the selected condition
RQO\VHOHFWWKHVLQJOHPRGH6LQJOH
ŏ$PL[LQJFXUYHLVVHW
7KH PL[LQJ FXUYH UDWH VWDUWV IURP D VPDOO
value.
)RU D URWRU ZLWK D FORFNZLVH RSHUDWLRQ
G LU HFWLRQ S RO D U L W \ Z KH Q SL W FK Z D V
RSHUDWHGDWWKHSOXVVLGHVHWVRWKDWPL[LQJ
LV LQ WKH FORFNZLVH GLUHFWLRQ )LUVW WULP DW
KRYHULQJ DQG WKHQ DGMXVW WKH QHXWUDO
position.
$GMXVWPHQWEHWZHHQVORZDQGKRYHULQJ
5HSHDWHGO\ KRYHU IURP WDNH RII DQG ODQG
IURPKRYHULQJDWDFRQVWDQWUDWHPDWFKHG
WR\RXURZQUK\WKPDQGDGMXVWWKHSLWFKVR
WKHQRVHGRHVQRWGHÁHFWZKHQWKHWKURWWOH
is raised and lowered.
7KURWWOHKLJKVLGHFOLPELQJDQGGLYLQJIURP
KRYHULQJ
*Repeat climbing and diving from hovering at a constant
rate matched to your own rhythm and adjust the pitch so
that the nose does not deflect when the throttle is raised
and lowered.
However, when a GY Series or other heading
hold gyro is used, since correction is performed
by the gyro, this mix is not used. If this function is
used when the gyro operation mode is the AVCS
mode, the neutral position will change.
6HWWKHPL[LQJUDWHVRWKDWWKHUXGGHUGLUHFWLRQ
DWKLJKVSHHGÁLJKWLVVWUDLJKWDKHDG$GMXVWIRU
each condition used.
ŏ$FFHOHUDWLRQRSHUDWLRQFDQEHSHUIRUPHG
IRUERWKVHWWLQJDWDFFHOHUDWLRQ+LJKDQG
VHWWLQJDWGHFHOHUDWLRQ/RZ
ŏ$FFHOHUDWLRQUDWHVHWWLQJ5DWH
ŏ7KHUHWXUQWLPHDIWHURSHUDWLRQ'XPSFDQ
be set.
ŏ $ Q R S H U D W L R Q S R L Q W $ F W 3 R V D W
acceleration and deceleration can be set
independently. When an operation point
ZDV H[FHHGHG DFFHOHUDWLRQ RSHUDWLRQ LV
SHUIRUPHG
ﶴﷂﶬﶒﶰﶪ
ﴶﴸﴸﳜ
ﶺﶶﶼ
ﶸﶶﶰﶺﶼ
ﴶﴸﳰﴶﴸﳰﴸﴸ
<B8JR0
ﻤfﻞf
ﴌﴈﴞﴜ
ﴂﴤﳾﴜ
ﳌ
ﴤ
ﴂﴤﳾﴜ
ﳌ
ﴢ
ﻤfﻞf
ﻚﻚ
ﻤfﻞf
ﴈﴚﴚﴀﴜﳾ
ﻚﻚ
ﻤfﻞf
ﳶ
ﳌ
ﴈﴚﴚﴀﴜﳾ
ﳖﴶﴮﴸ
ﳖﴶﴸﴸ
ﳖﴮﴸ
ﴸ
ﳒﴮﴸ
ﳒﴶﴸﴸ
ﳒﴶﴮﴸ
ﴆﴈﴀ ﳒﴮﴨﳐﴸ
ﳖﴸﳐﴸ
ﴂﴤﳾﴜ
ﴤﴠﳾﳎﴔﴊﴖ
ﴘﴂﴈﳼﴆ
B8D
F06*4
ﶴﷂﶬﶒﶰﶪ
ﴶﴸﴸﳜ
ﶺﶶﶼ
ﶸﶶﶰﶺﶼ
ﴶﴸﳰﴶﴸﳰﴸﴸ
ﺀﹼﹼﹸ﹪ﹸ﹞ﺀ﹚ﹰ﹤﹦
ﶬﵼﷂﶸﷄ
ﷆﶰﶶﶪﶴ
B8D
F06*4
fﻪ
ﶰﶬ
ﶪﶺﶴﷂﶸﷆ
ﶬ
ﵺ
ﶴﶶﶮ
ﶼﶶﶦ
ﷄﷂﷆﷄ
fﻪ
fﻪ
b\ﻪ
X\ﻪ
ﴂﴜﴀﴜﳾﳰﴂﴈﳾﳐﴐﴜﳴﳒﴶﴀﴜﴠ
ŏ1RUPDOO\XVH>/LQH@W\SH
ŏ6HOHFW>3,7WR58'@DWWKHPRGHOPHQXDQGFDOOWKH
setup screen shown below by pushing the enter
button.
(Currently selected condition name)