Hardy command numbers – Hardy HI 6600 Series Modular Sensor System User Manual
Page 116
HI 6600 Series Modular Sensor System User Guide
Page | 116
Hardy Command Numbers
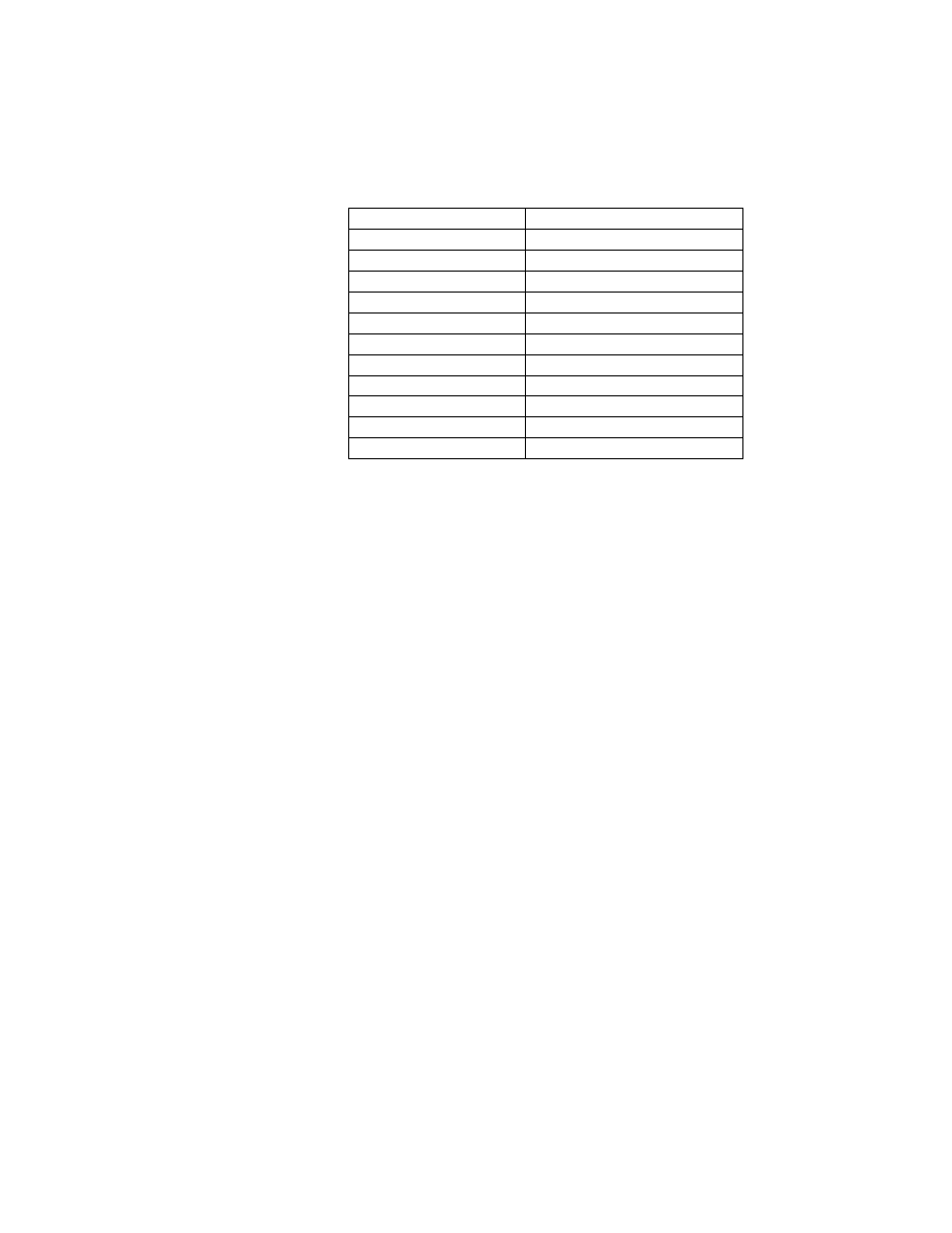
Here is a list of Hardy command numbers:
Command
Command
0
Read Parameter
1
Zero Cmd
2
Tare Cmd
4
Write Non-Volatile
5
Cmd (Reserved)
6
Weigh Sample Cmd
0x64
(100
Cal Low Cmd
0x65
(101
Cal High Cmd
0x66
(102
C2 Cal Cmd
0x1000 (4096
Write Integer Cmd
0x1001 (4097
Write Float Cmd
0: READ PARAM CMD. To read a parameter, write a #0 to the command register (register #0), and
write the parameter number in the parameter ID number in registers 2 and 3, most significant word first.
The parameter value may then be read from registers 4 and 5, again most significant word first. This value
may be in integer or floating point format, depending on the parameter. The status register in the reply
will contain the lower 16 bits of the system status word.
o
Status word bit 0: A/D error
o
Status word bit 6 (0x40): Motion status.
o
Status word bit 15 (0x8000): Not Found - the requested parameter number does not exist
1: ZERO CMD. Write a #1 to the command register to ZERO the gross weight. The status register will
read 0 if this command succeeds.
o
Status Error code 1 (motion)
o
Status Error code 2 (A/D error)
o
Status Error code 3 (out of tolerance)
2: TARE CMD. Write a #2 to the command register to ZERO the net weight. The status register will read
0 if this command succeeds:
o
Status Error code 1 (motion)
o
Status Error code 2 (A/D error)
4: WRITE NONVOL CMD. Write a #4 to the command register to save parameters in non-volatile
memory.
o
No Error Codes
5: CMD: Reserved
o
No Error Codes
6: WEIGHT SAMPLE CMD: Write a #6 to the command register to run the Weigh
Sample command to set up the calibration of the Counts (if enabled).
o
Status Error code 1 (motion)
o
Status error code 2 (A/D error)