3 encoder initialization, 1 encoder parameter changes, 1 encoder resolution change examples (multi turn) – Baumer ATD User Manual
Page 19: 2 scaling function control usage, 3 device description file (xml format), Encoder initialization, Ncoder, Arameter, Hanges, Encoder resolution change examples (multi turn)
EtherCAT
19/42
Baumer Thalheim GmbH & Co. KG
2011-10-04/rnik
Eschwege, Germany
3 Encoder
Initialization
Encoder initialization may differ from encoder version to version however general customizing steps are
common for all variants.
3.1 Encoder Parameter Changes
If the encoder output resolution should be changed the bit sfc in the object 0x6000 must be enabled. Else
changes in the resolution e.g. total resolution or single turn resolution are not accepted by the Encoder.
Minimum system cycle time performance in DC mode decreases if sfc is enabled. This behavior should be
considered if lowest cycle time in DC mode is desired.
Following encoder parameters may be changed by user via SDO:
counting direction e.g. CW or CCW
measuring units per revolution from 256 to 32.768
total measuring units 65.536 to 2.147.483.647 this means a multi turn counting range of 255 to
65.535
Preset value from 0 to 2.147.483.647
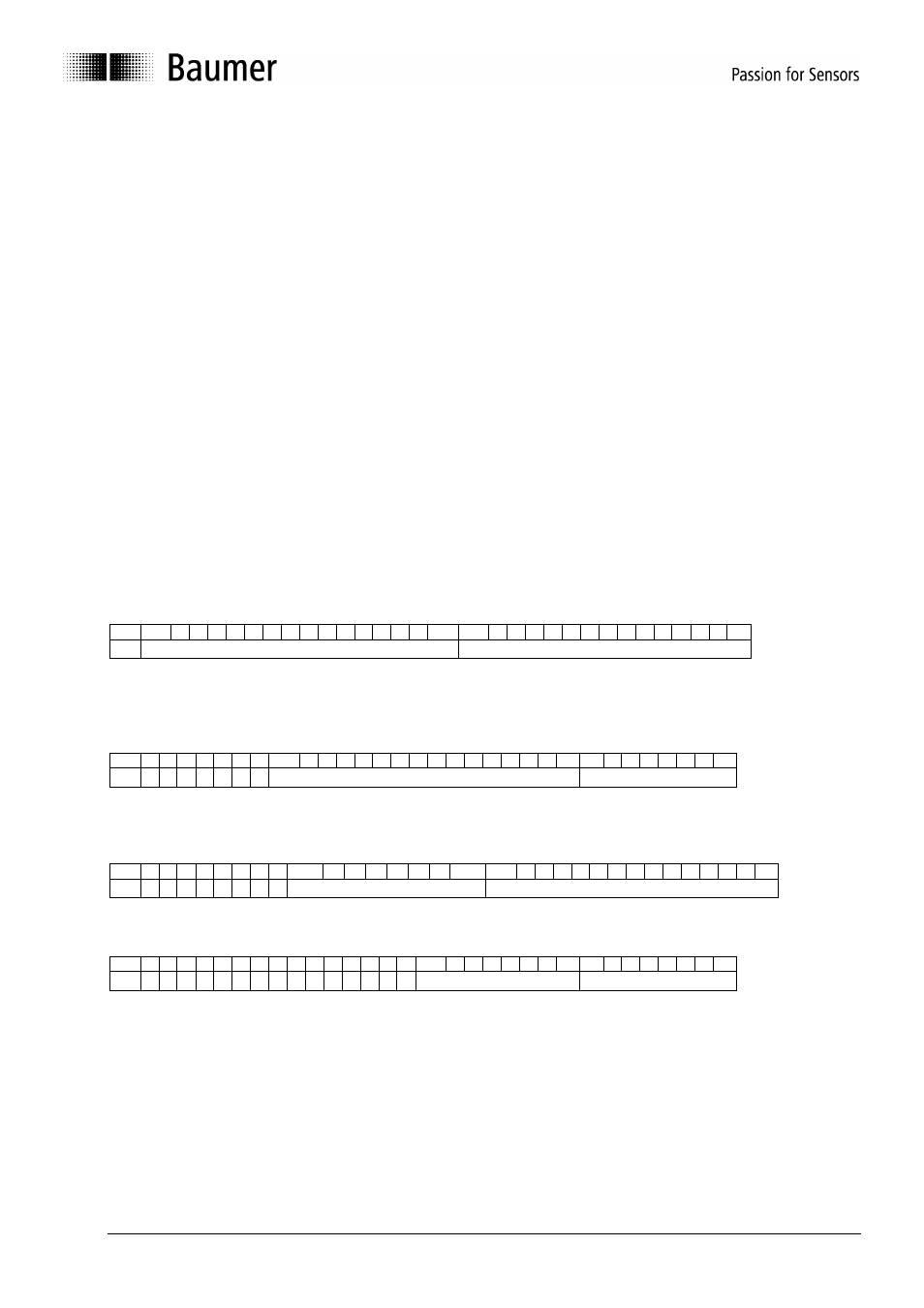
3.1.1 Encoder Resolution Change Examples (multi turn)
Default setup MAX single turn, MAX Multi turn resolution with PDO Data for 0x6002 = 0x8000 0000 and
0x6001 = 0x0000 8000
31
30
16
15
0
2
16
Multi turn position value
2
15
Single turn position value
MIN single turn, MAX Multi turn resolution with PDO Data for 0x6002 = 0x0100 0000 and 0x6001 = 0x0000
0100:
31
23
8
7
0
2
16
Multi turn position value
2
8
ST position value
MAX single turn, MIN Multi turn resolution with PDO Data for 0x6002 = 0x0080 0000 and 0x6001 = 0x0000
8000:
31
22
15
14
0
2
8
Multi turn position value
2
15
Single turn position value
MIN single turn, MIN Multi turn resolution with PDO Data for 0x6002 = 0x0001 0000 and 0x6001 = 0x000
0100:
31
15
8
7
0
2
8
MT position value
2
8
ST position value
3.1.2 Scaling Function Control Usage
Using the Scaling Function Control degrades the Minimum Cycle Time of the encoder slightly because the
encoder has to calculate and shift real physical data from the optic block to fit user resolution values.
3.1.3 Device Description File (xml Format)
The “ATD 4B A 4 Y11.xml” file contains Vendor and Device specific information and is provided at the Bau-
mer home page for download.