Rockwell Automation 2092-DAx Ultra1500 Digital Servo Drive Quick Start User Manual
Page 11
Ultra1500 Digital Drives Quick Start 11
Publication 2092-QS001D-EN-P — July 2005
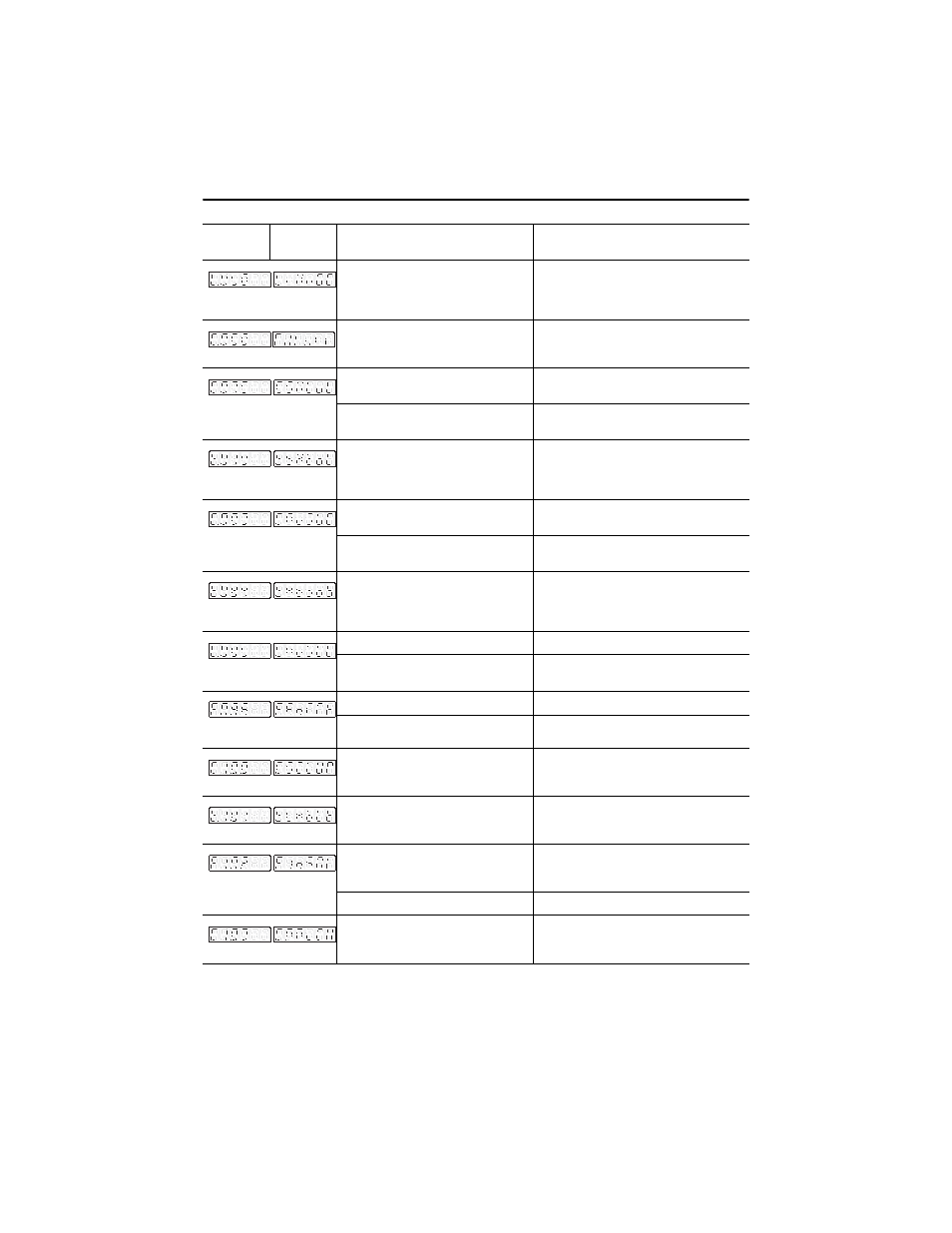
User Parameter Range
Error
Range of parameter is invalid
• Enter parameter with value(s) within
range.
• Reset drive to factory defaults.
Drive Initialization Error
Hardware error
Replace drive.
Shunt Overload Protection
Power at regenerative resistor exceeds
the permitted value
Adjust motion profile to stay within the range
of the regenerative resistor.
Shunt resistor is disconnected or
damaged
• Verify resistor connection.
• Verify resistance of shunt resistor.
Shunt Overcurrent
Protection
Shunt current exceeded allowable
instantaneous value
• Verify shunt is not shorted or damaged.
• Verify load energy is not excessive during
deceleration.
Absolute Encoder Battery
Error
Encoder Backup Battery parameter is set
to installed, but a battery is not installed.
Set Encoder Backup Battery parameter to Not
Installed.
Battery voltage is sensed below 2.7V dc.
• Confirm battery voltage and connection.
• Replace battery.
Absolute Encoder
Overspeed
Battery powered encoder is
mechanically rotated at high speed
while drive is powered down
• Mechanically disengage motor from
system.
• Cycle power to drive and reset alarm.
Absolute Encoder
Multi-turn Count Error
Noise in the encoder
Cycle power to drive and reset alarm.
Defective encoder
Replace motor.
Encoder Single-Turn Count
Error
Noise in the encoder
Cycle power to drive and reset alarm.
Defective encoder
Replace motor.
Drive Set Up
The drive operating mode and motor
selection are incompatible.
Change the operating mode and/or the motor
selection, and reset the drive.
Motor Power Cable Open
Motor cable open
Verify power connection between motor and
drive.
Motor Instantaneous
Current Overload
Motion profile requires a peak current
for an excessive time interval
• Verify motor wiring.
• Adjust accel/decel time.
• Confirm motor selection.
Defective current feedback sensing
Verify phase currents.
Motor Mismatch
Dynamic braking current of the selected
motor exceeds twice the drive peak
current rating
Install a different motor.
Error
Code
Text
Message
Possible Cause
Action/Solution