Rockwell Automation 1391ES AC Servo Controller User Manual
Page 53
The 1326 AC Servomotor
Chapter 8
8-55
Tp – the peak torque that can be produced by the motor/controller
combination with both at rated temperature and the motor in a 40
°
C
ambient and the controller in a 60
°
C ambient. Since 200% current torque
peaks are common in many applications for optimal controller usage, the
following curves show typical system performance. Higher peak torques
are permissible where RMS torque is less than or equal to the rated torque
(Tc). 1391B-ES operation is shown in the outer envelope and will show
higher speed and 300% torque capability.
Rated Speed – the operating speed of the controller and motor
combination at which a minimum of 70% of continuous rated torque (Tc)
can be developed. This point is defined with the motor at 25
°
C and
controller operating in a 60
°
C ambient.
Rated Operation Area – boundary of speed-torque curve where the motor
and controller combination may operate on a servo basis without exceeding
the RMS rating of either.
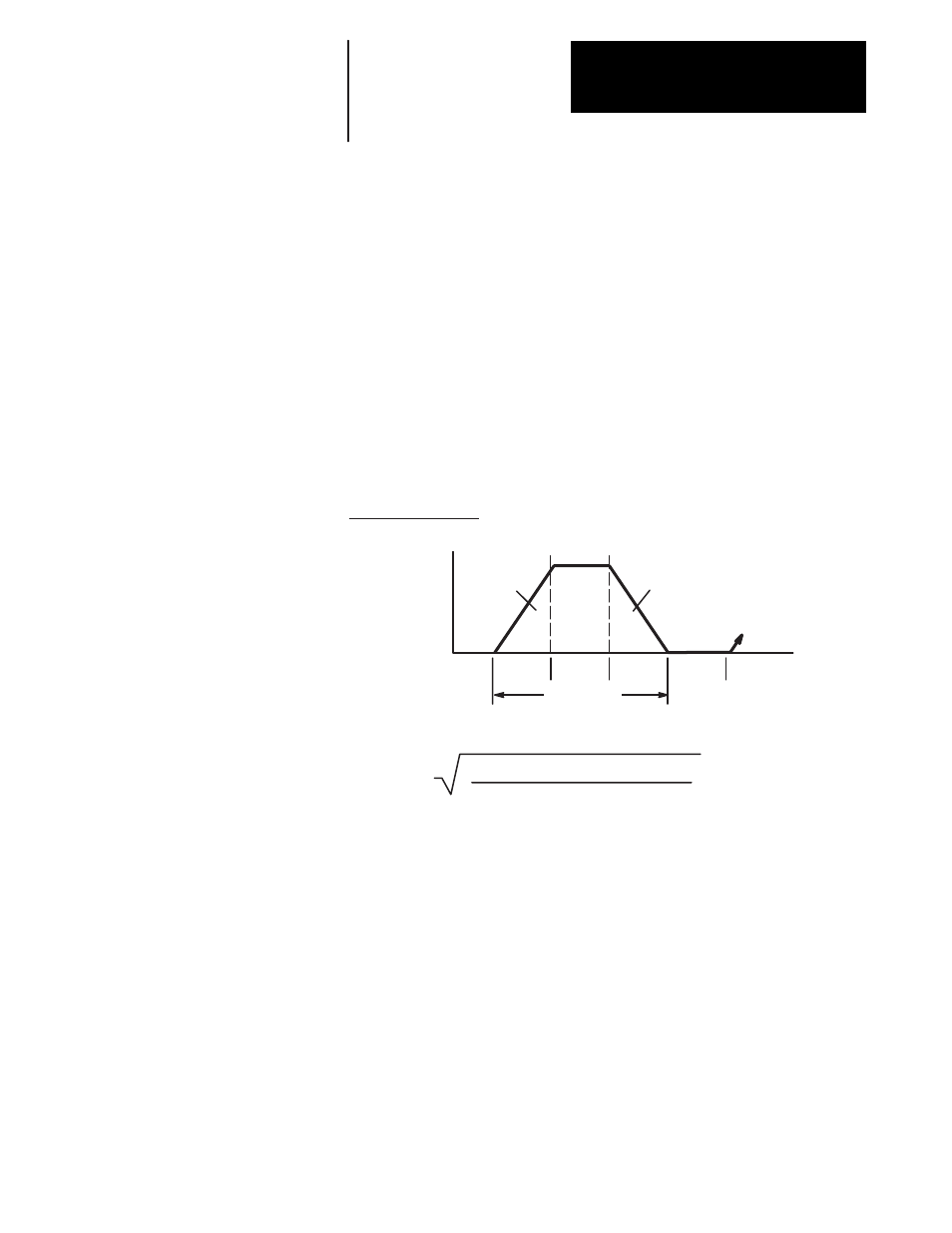
Duty Cycle Profile
Decelerat
e (Tpd)
Accelerat
e (Tpa)
Repeat
Move
Cycle
RPM
Stead
y
Speed
(Tss)
Rest
(Tr)
Total Cycle
Time
t
1
t
2
t
3
t
4
where:
Trms
The motors RMS or average torque over the duty cycle. (Expressed in
lb.-in. or lb.-ft. The same units must be used throughout the formula.)
Tpa
Motor peak torque to accelerate to maximum speed. (Expressed in lb.-in.
or lb.-ft. The same units must be used throughout the formula.)
Tss
Motor torque present at the motor shaft during constant speed segment.
(Expressed in lb.-in. or lb.-ft. The same units must be used throughout the
formula.)
Tpd
Motor peak torque to decelerate to zero speed. (Expressed in lb.-in. or
lb.-ft. The same units must be used throughout the formula.)
Tr
Torque when motor is at zero speed (typically is Tss).
t
1
, t
2
, t
3
, t
4
Time for each portion of the duty cycle in seconds.
Tpa
2
x t
1
+ Tss
2
x t
2
+ Tpd
2
x t
3
+ Tr
2
x t
4
t
1
+ t
2
+ t
3
+ t
4
Trms =
Intermittent Operation Area – Boundary of speed-torque curve where
the motor and controller combination may operate in acceleration-decelera-
tion mode without exceeding peak rating of either, provided that the duty
cycle RMS continuous torque limit is not exceeded.