Payload deployment, Payload separation, Collision/contamination avoidance maneuver – Orbital Minotaur I User Manual
Page 32
Minotaur I User’s Guide
Section 3.0 – General Performance
3.5. Payload Deployment
Following orbit insertion, the Minotaur I Stage 4 avionics subsystem can execute a series of ACS
maneuvers to provide the desired initial payload attitude prior to separation. This capability may also be
used to incrementally reorient Stage 4 for the
deployment of multiple spacecraft with
independent attitude requirements. Either an
inertially-fixed or spin-stabilized attitude may be
specified by the customer. The maximum spin rate
for a specific mission depends upon the spin axis
moment of inertia of the payload and the amount
of ACS propellant needed for other attitude
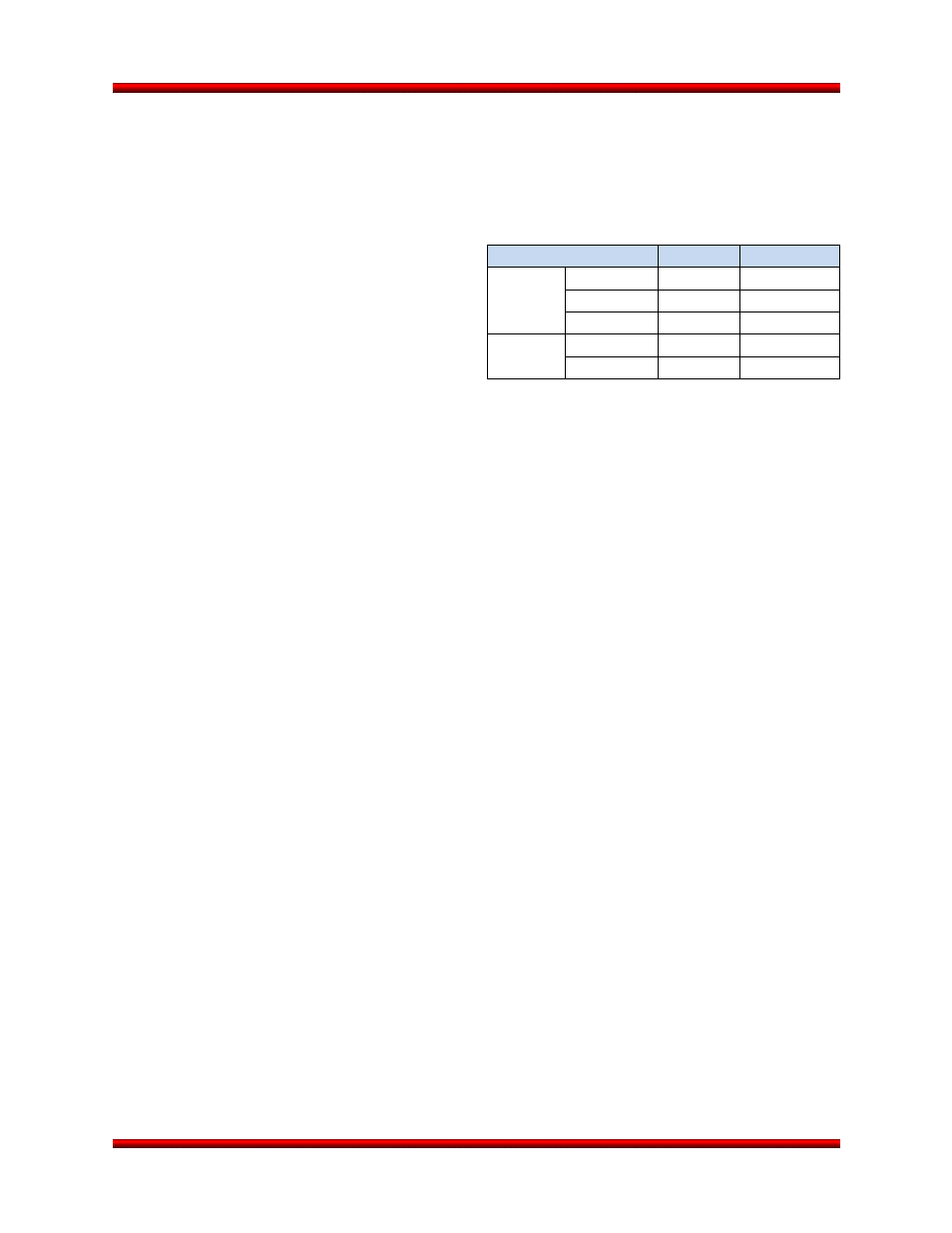
maneuvers. Table 3.5-1 provides the typical
payload pointing and spin rate accuracies.
3.6. Payload Separation
Payload separation dynamics are highly dependent on the mass properties of the payload and the
particular separation system utilized. The primary parameters to be considered are payload tip-off and the
overall separation velocity.
Payload tip-off refers to the angular velocity imparted to the payload upon separation due to payload
Center of Gravity (CG) offsets and an uneven distribution of torques and forces. Separation system
options are discussed further in Section 5.2.5. Orbital performs a mission-specific tip-off analysis for each
payload.
Separation velocities are driven by the need to prevent recontact between the payload and the Minotaur I
final stage after separation. The value will typically be 0.6 to 0.9 m/sec (2 to 3 ft/sec).
3.7. Collision/Contamination Avoidance Maneuver
Following orbit insertion and payload separation, the Minotaur final stage will perform a Collision/
Contamination Avoidance Maneuver (C/CAM). The C/CAM minimizes both payload contamination and
the potential for recontact between Minotaur I hardware and the separated payload. Orbital will perform a
recontact analysis for post separation events.
A typical C/CAM begins shortly after payload separation. The launch vehicle performs a 90° yaw
maneuver designed to direct any remaining motor impulse in a direction which will increase the
separation distance between the two bodies. After a delay to allow the distance between the spacecraft
and Stage 4 to increase to a safe level, the launch vehicle begins a “crab-walk” maneuver to impart a
small amount of delta velocity, increasing the separation between the payload and the final stage.
Following the completion of the C/CAM maneuver as described above and any remaining maneuvers,
such as separating other small secondary payloads or downlinking of delayed telemetry data, the ACS
valves are opened and the remaining ACS nitrogen propellant is expelled to meet international space
debris guidelines.
Table 3.5-1. Typical Pre-Separation Payload
Pointing and Spin Rate Accuracies
Error Type
Angle
Rate
3-Axis
Yaw
±1.0°
≤1.0°/sec
Pitch
±1.0°
≤1.0°/sec
Roll
±1.0°
≤1.0°/sec
Spinning
Spin Axis
±1.0°
≤10 rpm
Spin Rate
--
±3°/sec
Release 3.0
March 2014
19