4 positioning with final speed, 9400 technology applications | table positioning – Lenze E94AxHE Technology Application Table positioning User Manual
Page 24
9400 Technology applications | Table positioning
Parameter setting & configuration
Profile data management
24
L
EDS94TA10050xxxx EN 1.2 - 03/2010
5.4.4
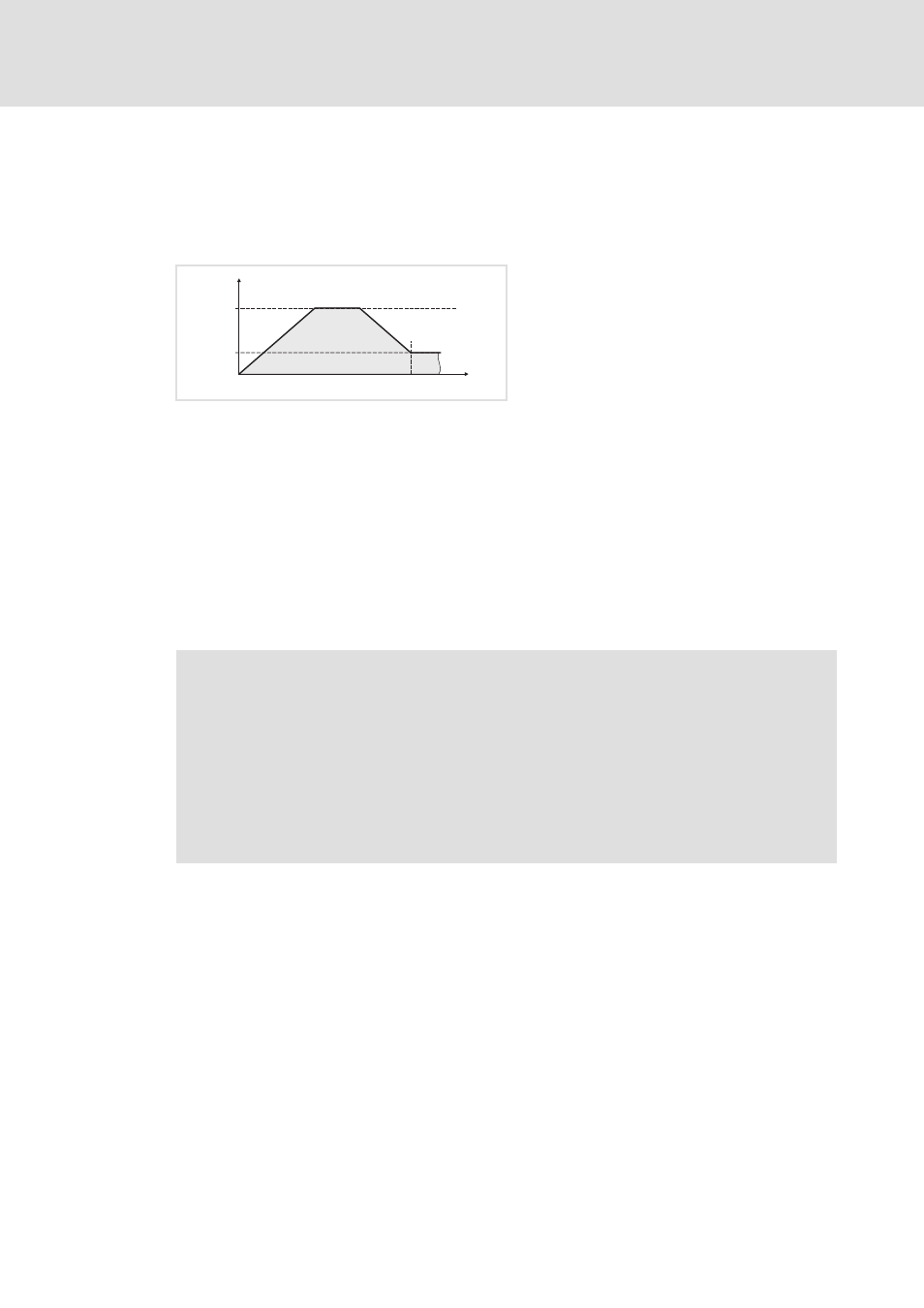
Positioning with final speed
If a positioning process with a final speed other than zero is carried out, a velocity
changeover / overchange can be realised, i.e. a second positioning process is started
immediately once the target position is reached, and the drive does not come to a standstill
at the first target position.
[5-5]
The principle of velocity changeover / overchange
Normally, the drive has reached the final speed when the target position is reached.
The profile is run through which is defined via "Profile data sequence profile without
TP".
The final speed must not exceed the maximum profile speed.
– The speed is internally limited to the profile speed.
– This is the maximum value for the final speed if the profile speed is reduced via
override. (This behaviour may add to the cases described in the note below.)
– The speed limitation is not affected by subsequent increases in the override value.
n
Target position
o
Final speed (here unequal "0")
v
pos
v
end
v [m/s]
t [s]
Note!
Positioning processes with final speeds other than zero do not permit reversing.
In this case, the positioning process is aborted and an error is issued.
In the case of positioning processes with final speeds and if S-shaped ramps are
used, a plausibility check as to whether the final speed can be reached is carried
out when the profile is started. If the final speed cannot be reached, the
positioning process is aborted and an error is issued. This is often the case if the
positioning process has been paused and is then to be continued.