9400 technology applications | table positioning – Lenze E94AxHE Technology Application Table positioning User Manual
Page 19
EDS94TA10050xxxx EN 1.2 - 03/2010
L
19
9400 Technology applications | Table positioning
Parameter setting & configuration
Profile data management
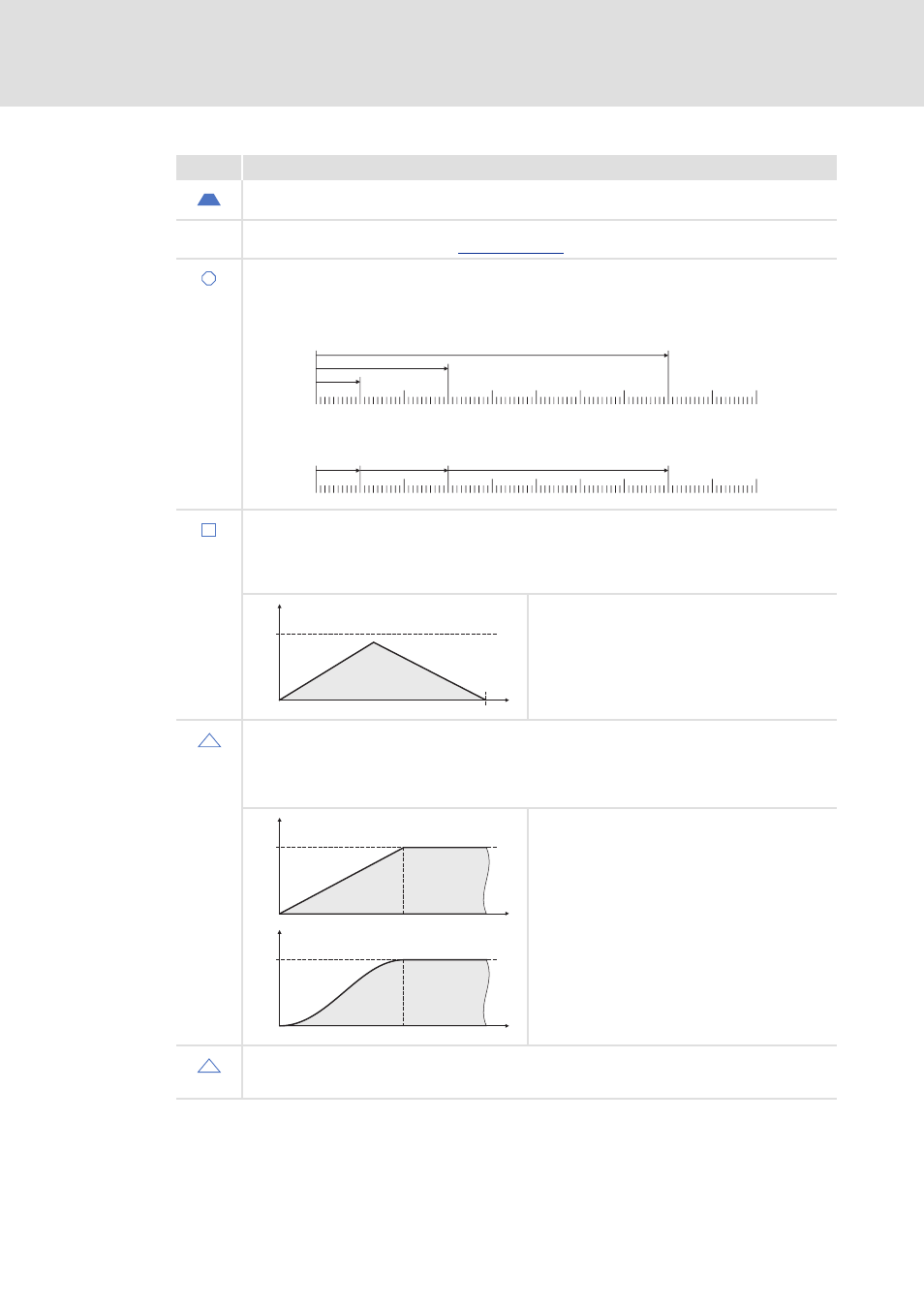
Symbol Profile parameters
(Standard) profile
Profile data set (profile no. 1 ... 75) in which the profile data are stored.
Mode
Selection of the positioning mode.
Position
Target position or path distance to be traversed.
The position is either indicated as absolute or relative position.
• An absolute position always specifies the distance to the zero position defined:
absolute position = target position
• A relative position indicates the distance to the starting position (current position):
Relative position = target position - starting position
Speed
Maximum speed with which the target is to be approached.
• Depending on the profile parameter position, acceleration and deceleration, it is possible that the
drive may not reach the maximum speed. In this case, the graph would display a triangle instead of
a trapezium.
n
Acceleration
o
Travelling speed (is not reached here)
p
Deceleration
q
Target position (or feed distance)
Acceleration
Selection of the change in speed by which acceleration is to be carried out maximally.
• The following two acceleration types are distinguished:
–Constant acceleration: the speed increases linearly.
–Linearly increasing acceleration: The speed increases in S-shapes.
n
Constant acceleration
o
Linearly increasing acceleration
Deceleration
Selection of the change in speed by means of which deceleration to standstill is to be maximally effected
again.
A
10
20
30
40
50
60
70
80
90
100
10
30
80
P1
P2
P3
0
10
20
30
40
50
60
70
80
90
100
10
20
50
P3
P2
P1
0
B
v
pos
v [m/s]
t [s]
C
v
pos
v
pos
v [m/s]
v [m/s]
t [s]
t [s]
D