15fault codes (dfaults register), Fault codes (dfaults register), 15 fault codes (dfaults register) – Lenze PMSS1000 Simple Servo User Manual
Page 48
Indexer-Programmer-Manual.pdf REV 1.3
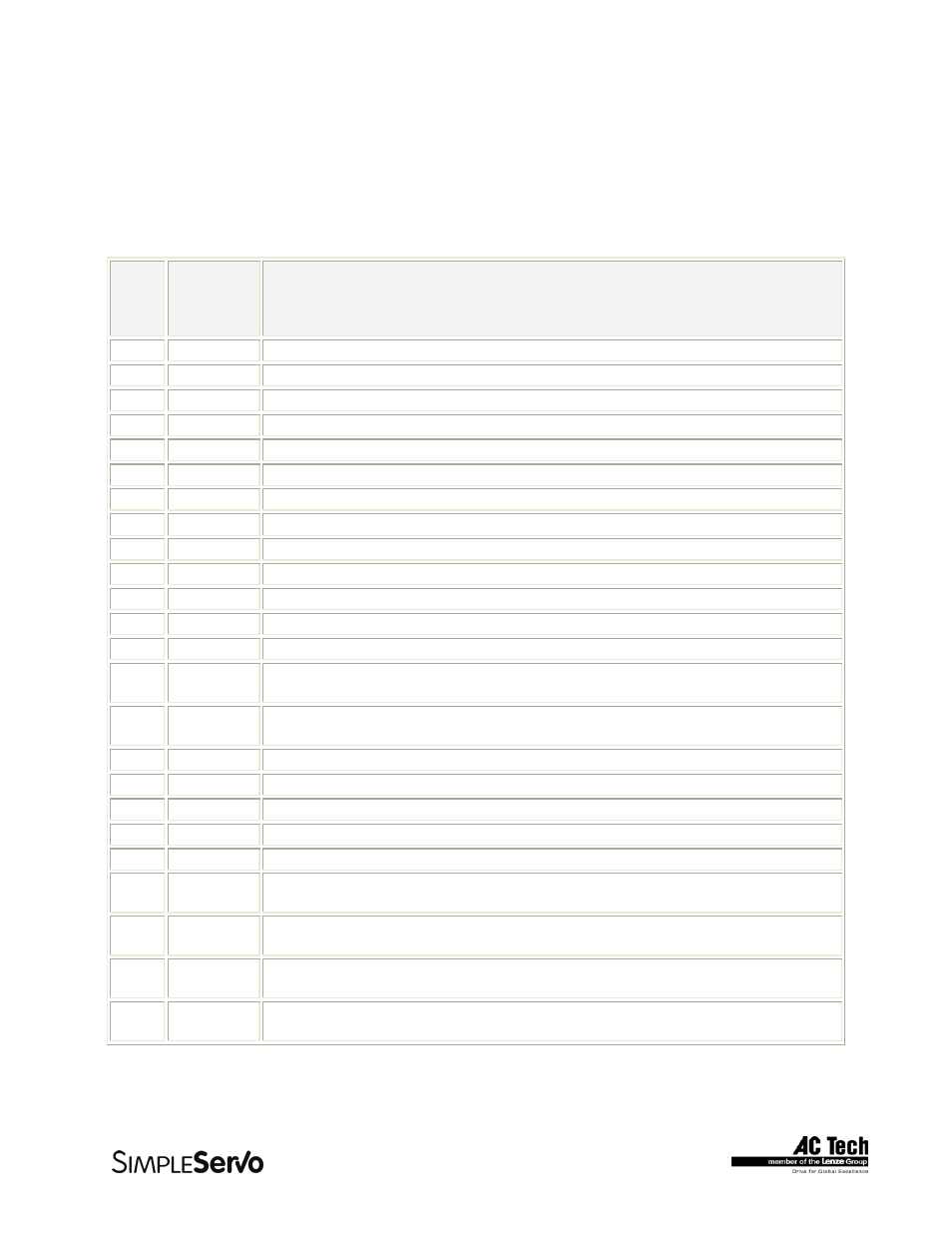
2.15 Fault Codes (DFAULTS register)
Whenever fault has occurred it will be recorded in special system variable called Fault Register. In
addition specific flags in System Status Register (see next section for details) will be set helping to
indicate what class of faults occurred fault belongs to. Below is the table summarizing possible fault
codes. Codes from 1 to 16 are reserved for DSP subsystem errors. Codes above that range are
generated by various systems of SSi.
Fault
ID
Associated
flags in
status
register
Description
1 1,
3 Overvoltage
2
1, 3
Invalid hall sensors code
3 1,
3 Overcurrent
4 1,
3 Overtemperature
5 1,
3 Reserved
6
1, 3
Overspeed. (Overspeed limit set by motor capability in motor file)
7
1, 3
Position error excess.
8
1, 3
Attempt to enable while motor data array invalid or motor was not selected.
9-16
Reserved
17
3
Unrecoverable error.
18 16 Division
by
zero
19 16 Arithmetic
overflow
20
3
Subroutine stack overflow. Exceeded 16 levels subroutines stack depth.
21 3
Subroutine stack underflow. Attempt to execute RETURN statement without
preceding call to subroutine.
22 3
Variable evaluation stack overflow. Expression too complicated for compiler to
process.
23
21
Motion Queue overflow. 32 levels depth exceeded
24
21
Motion Queue underflow. Last queued MDV statement has non 0 target velocity
25
3
Unknown opcode. Byte code interpreter error
26
3
Unknown byte code. Byte code interpreter error
27
21
Drive disabled. Attempt to execute motion while drive is disabled.
28 16,
21
Accel too big. Motion statement parameters result in calculating too big Accel
value for system to handle
29 16,
21
Accel too small. Motion statement parameters result in calculating too small
Accel value for system to handle
30 16,
21
Velocity too big. Motion statement parameters result in calculating too big
velocity value for system to handle
31 16,
21
Velocity too small. Motion statement parameters result in calculating too small
velocity value for system to handle
48