14 implemented cip™ objects – Lenze E84AYCEO User Manual
Page 133
Lenze · E84AYCEO communication module (EtherNet/IP™) · Communication Manual · DMS 3.0 EN · 10/2013 · TD17
133
14
Implemented CIP™ objects
14.1
General CIP objects
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
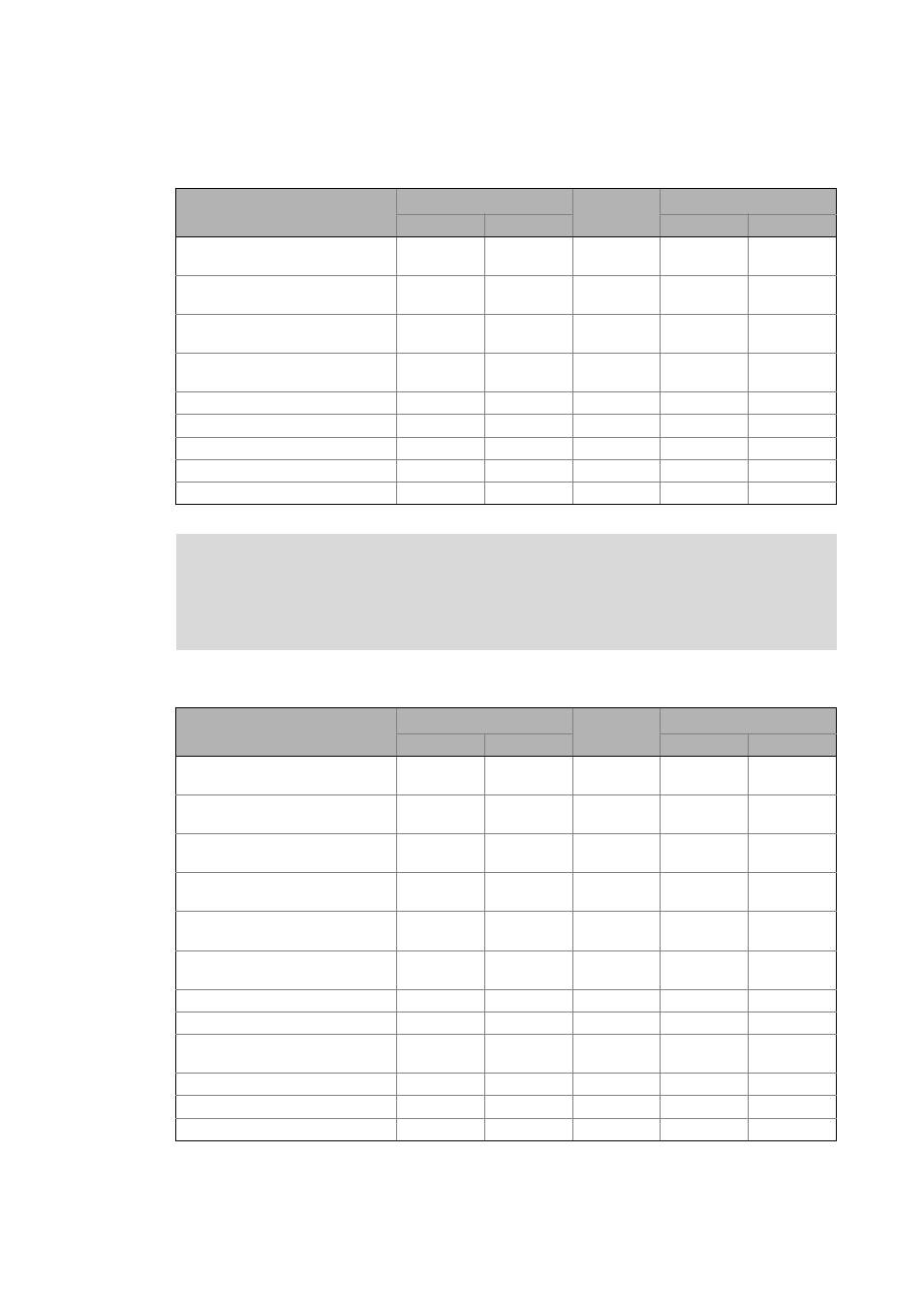
Data mapping of the output assemblies
Data mapping of the input assemblies
Data component
[Bits 0 ... 7]
Class
Instance
Number
Attribute
Name
Number
Name
Number
RunFwd [Bit 0]
Control
Supervisor
0x29
1
Run1
3
RunRev [Bit 1]
Control
Supervisor
0x29
1
Run2
4
FaultReset [Bit 2]
Control
Supervisor
0x29
1
FaultRst
12
NetCtrl [Bit 5]
Control
Supervisor
0x29
1
NetCtrl
5
NetRef [Bit 6]
AC Drive
0x2A
1
NetRef
4
Drive Mode [Bits 0 ... 7]
AC Drive
0x2A
1
DriveMode
6
Speed Reference [Bits 0 ... 7]
AC Drive
0x2A
1
SpeedRef
8
Torque Reference [Bits 0 ... 7]
AC Drive
0x2A
1
TorqueRef
12
Custom Output [Bits 0 ... 7]
Note!
In case of the assembly object instances 21 (0x15) and 23 (0x17), NetCtrl (Bit 5) and
NetRef (Bit 6) have to be set in order that the drive can receive start/stop commands and
speed/torque commands via the network.
Data component
[Bits 0 ... 7]
Class
Instance
Number
Attribute
Name
Number
Name
Number
Faulted [Bit 0]
Control
Supervisor
0x29
1
Faulted
10
Warning [Bit 1]
Control
Supervisor
0x29
1
Warning
11
Running1 (Fwd) [Bit 2]
Control
Supervisor
0x29
1
Running1
7
Running2 (Rev) [Bit 3]
Control
Supervisor
0x29
1
Running2
8
Ready [Bit 4]
Control
Supervisor
0x29
1
Ready
9
CtrlFromNet [Bit 5]
Control
Supervisor
0x29
1
CtrlFromNet
15
RefFromNet [Bit 6]
AC Drive
0x2A
1
RefFromNet
29
At Reference [Bit 7]
AC Drive
0x2A
1
AtReference
3
Drive State [Bits 0 ... 7]
Control
Supervisor
0x29
1
State
6
Speed Actual [Bits 0 ... 7]
AC Drive
0x2A
1
SpeedActual
7
Torque Actual [Bits 0 ... 7]
AC Drive
0x2A
1
TorqueActual
11
Custom Input [Bits 0 ... 7]