Object 0x6081: profile velocity, Object 0x6082: end velocity (not yet implemented) – ElmoMC CANopen DSP 402 Implementation Guide User Manual
Page 82
Object 0x6081: Profile velocity
This object is the velocity normally attained at the end of the acceleration ramp during a
profiled move and is valid for both directions of motion. The profile velocity is given in
user-defined speed units. It is converted to position increments per second using the
velocity encoder factor.
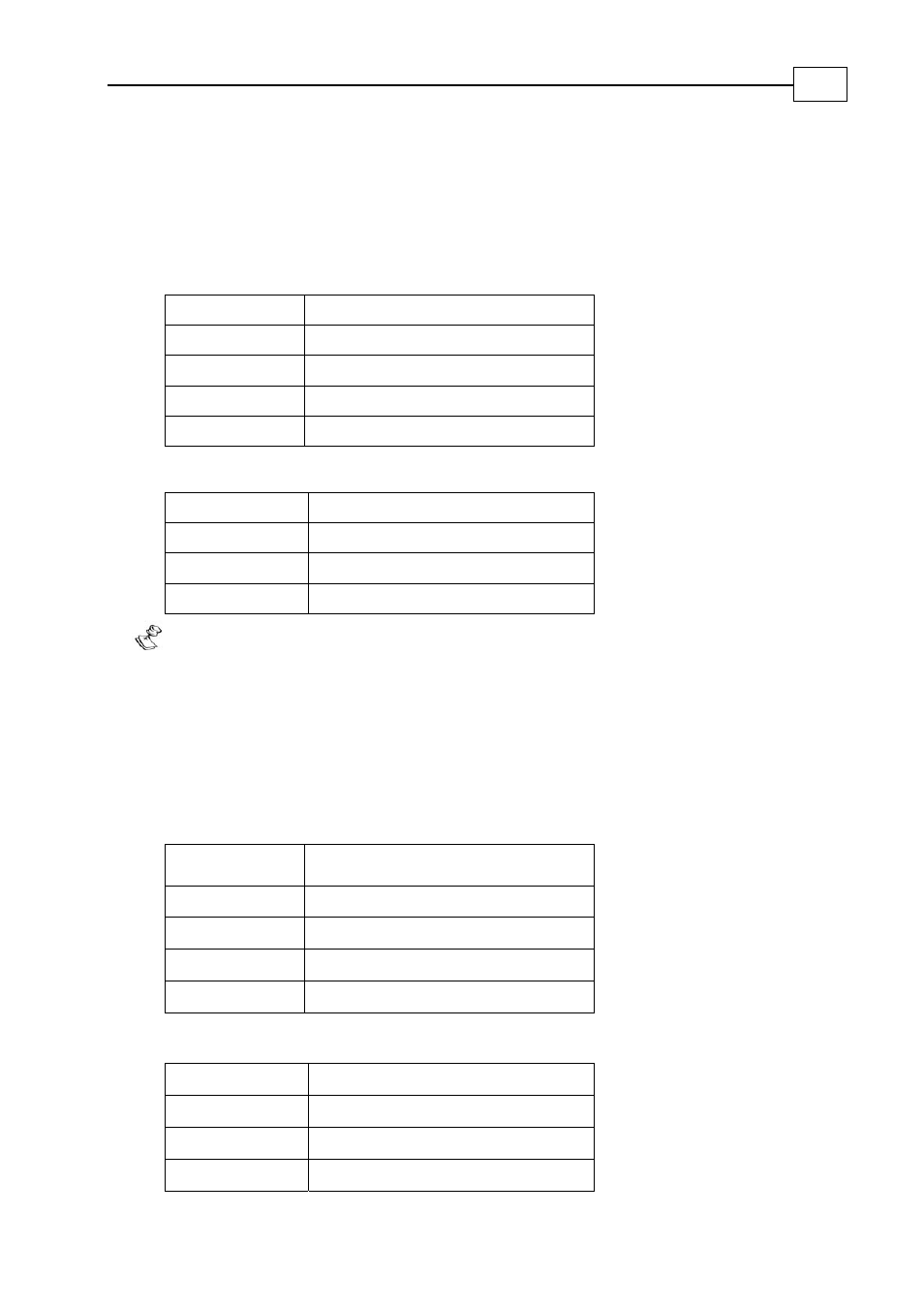
Object description:
Index 6081h
Name Profile
velocity
Object code
VAR
Data type
UNSIGNED32
Category Optional
Entry description:
Access Read/write
PDO mapping
No
Value range
UNSIGNED32
Default value
No
The value and default value of the profile velocity is reflected in the SP command, to
which the range and restrictions are ultimately submitted (refer to the
SimplIQ
Command Reference Manual).
Object 0x6082: End velocity (not yet implemented)
The end velocity defines the velocity required by the drive upon reaching the target
position. Normally, the drive stops at the target position; that is, the end velocity = 0. The
end velocity is given in the same units as profile velocity.
Object description:
Index 6082h
Name End
velocity
Object code
VAR
Data type
UNSIGNED32
Category Optional
Entry description:
Access Read/write
PDO mapping
No
Value range
UNSIGNED32
Default value
0
CANopen DSP 402 Implementation Guide
MAN-CAN402IG (Ver. 1.2)
76