Ata6264 [preliminary – Atmel ATA6264 User Manual
Page 38
38
4929B–AUTO–01/07
ATA6264 [Preliminary]
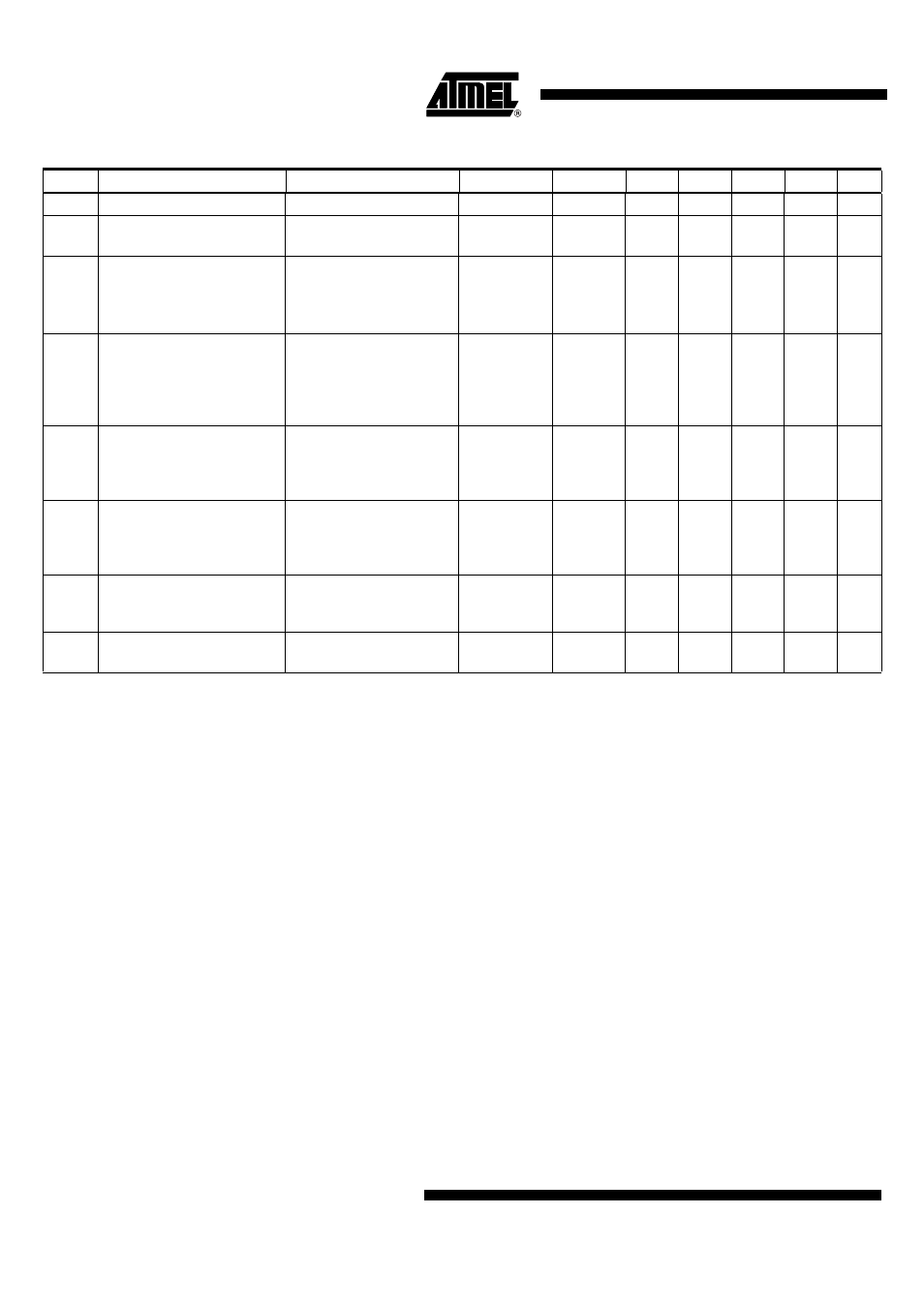
11.25
Leading-edge blanking time
t
blank
150
200
ns
D
11.26
Slope of artificial ramp for
slope compensation
dV/dt
80
(1)
150
(1)
mV/µs
D
11.27
Voltage level at K30 to switch
VCORE supply from EVZ to
K30 (V
VCORE
= 1.8V or 2.5V
programmed)
V
K30
increasing
See number 7.3 of
A
11.28
Hysteresis at K30 to switch
VCORE supply from K30 to
EVZ
(V
VCORE
= 1.8V or 2.5V
programmed)
V
K30
decreasing
See number 7.4 of
A
11.29
Voltage level at K30 to switch
VCORE supply from EVZ to
K30 (V
VCORE
= 5V
programmed)
V
K30
increasing
K30
V
K30
6.1
8.1
V
A
11.30
Hysteresis at K30 to switch
VCORE supply from K30 to
EVZ (V
VCORE
= 5V
programmed)
V
K30
decreasing
K30
V
K30
0.5
1
V
A
11.31
Time to switch VCORE
supply from EVZ to K30 or
K30 to EVZ
SVCORE
t
switch
0
7.6
µs
D
11.32
VCORE loss-detection
threshold
(2)
VCORE
I
Load
0
1
mA
D
Table 12-1.
Electrical Characteristics (Continued)– VCORE Power Supply
No.
Parameters
Test Conditions
Pin
Symbol
Min
Typ.
Max.
Unit
Type*
*) Type means: A = 100% tested, B = 100% correlation tested, C = Characterized on samples, D = Design parameter
Notes:
1. Depending on implementation of slope compensation, sub-harmonics have to be prevented.
2. The value of the minimum load current must be higher than the internal pull-up current at pin VCORE to ensure proper
function of the regulator.