E 17, Managing the keypad, Terminal control – Beijer Electronics Industrial Inverter E2 User Manual
Page 17: Operation
17
5. Operation
5.1. Managing the Keypad
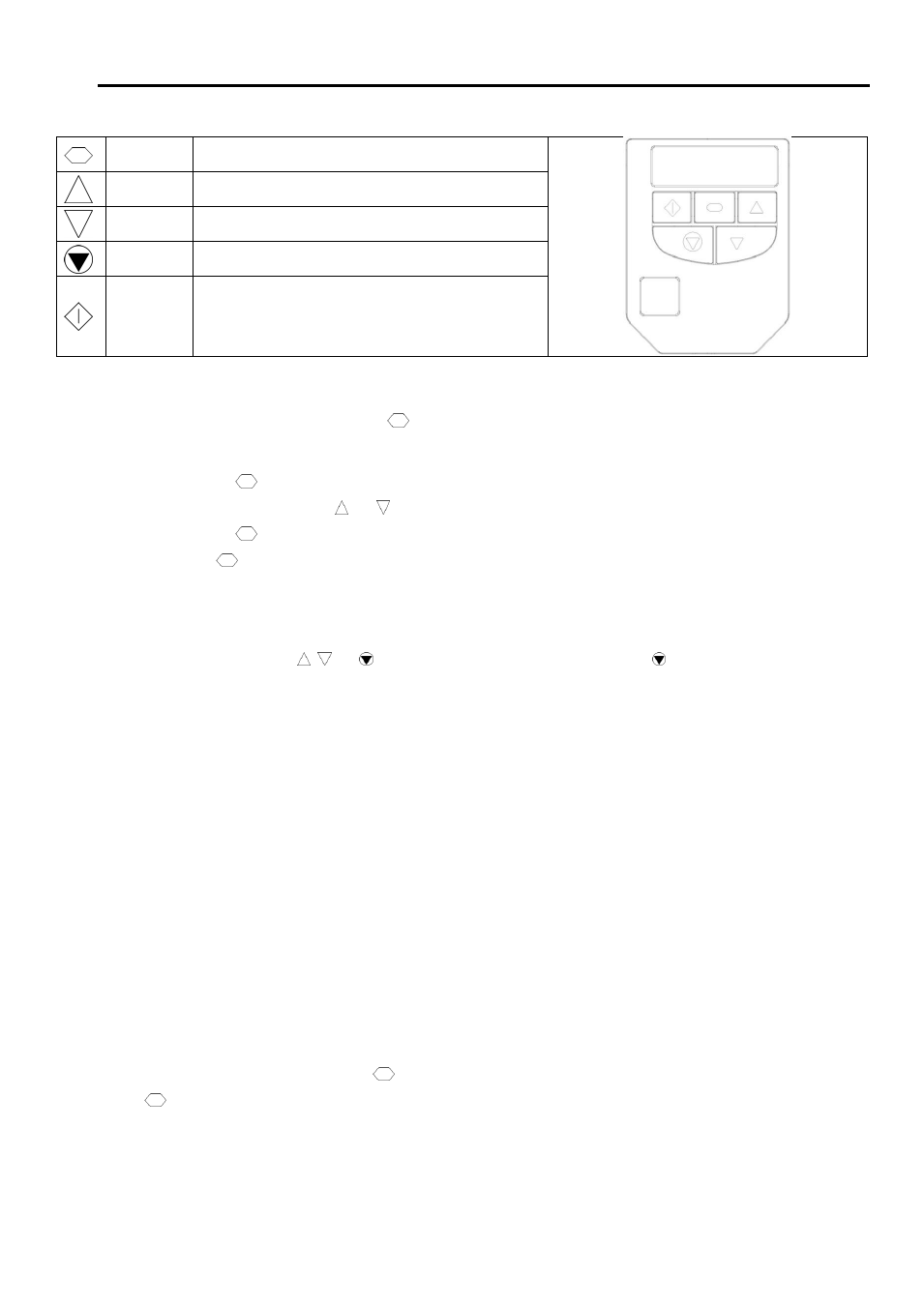
The drive is configured and its operation monitored via the keypad and display.
NAVIGATE
Used to display real-time information, to access and exit
parameter edit mode and to store parameter changes
UP
Used to increase speed in real-time mode or to increase
parameter values in parameter edit mode
DOWN
Used to decrease speed in real-time mode or to decrease
parameter values in parameter edit mode
RESET /
STOP
Used to reset a tripped drive.
When in Keypad mode is used to Stop a running drive.
START
When in keypad mode, used to Start a stopped drive or to
reverse the direction of rotation if bi-directional keypad
mode is enabled
Changing Parameters
1. To change a parameter value press and hold the
key for >1s whilst the drive displays
.
2. The display changes to
, indicating parameter 01.
3. Press and release the
key to display the value of this parameter.
4. Change to the required value using the
and
keys.
5. Press and release the
key once more to store the change.
6. Press and hold the
key for >1s to return to real-time mode.
7. The display shows
if the drive is stopped or the real-time information (e.g. speed) if the drive is running.
Reset Factory Default Settings
To reset factory default parameters, press
,
and
for >2s. The display shows
. Press the
button to acknowledge and reset
the drive.
5.2. Terminal Control
When delivered, the drive is in the factory default state, meaning that it is set to operate in terminal control mode and all parameters (P-xx)
have the default values as indicated in section 6 Parameters.
1. Connect motor to drive, checking star/delta connection for the voltage rating
2. Enter motor data from motor nameplate, P-07 = motor rated voltage, P-08 = motor rated current, P-09 = motor rated frequency.
3. Connect a control switch between the control terminals 1 and 2 ensuring that the contact is open (drive disabled).
4. Connect a potentiometer (1kΩ min to 10 kΩ max) between terminals 5 and 7, and the wiper to terminal 6.
5. With the potentiometer set to zero, switch on the supply to the drive. The display will show
.
6. Close the control switch, terminals 1-2. The drive is now ‘enabled’ and the output frequency/speed are controlled by the
potentiometer. The display shows zero speed in Hz (
.
) with the potentiometer turned to minimum.
7. Turn the potentiometer to maximum. The motor will accelerate to 50Hz (the default value of P-01) under the control of the
accelerating ramp time P-03. The display shows 50Hz (
.
) at max speed.
8. To display motor current (A), briefly press the
(Navigate) key.
9. Press
again to return to speed display.
10. To stop the motor, either turn the potentiometer back to zero or disable the drive by opening the control switch (terminals 1-2).
If the enable/disable switch is opened the drive will decelerate to stop at which time the display will show
. If the potentiometer is
turned to zero with the enable/disable closed the display will show
.
(0.0Hz), if left like this for 20 seconds the drive will go into
standby mode, display shows
, waiting for a speed reference signal.