Torque control algorithms – XLT Hitachi X200 User Manual
Page 99
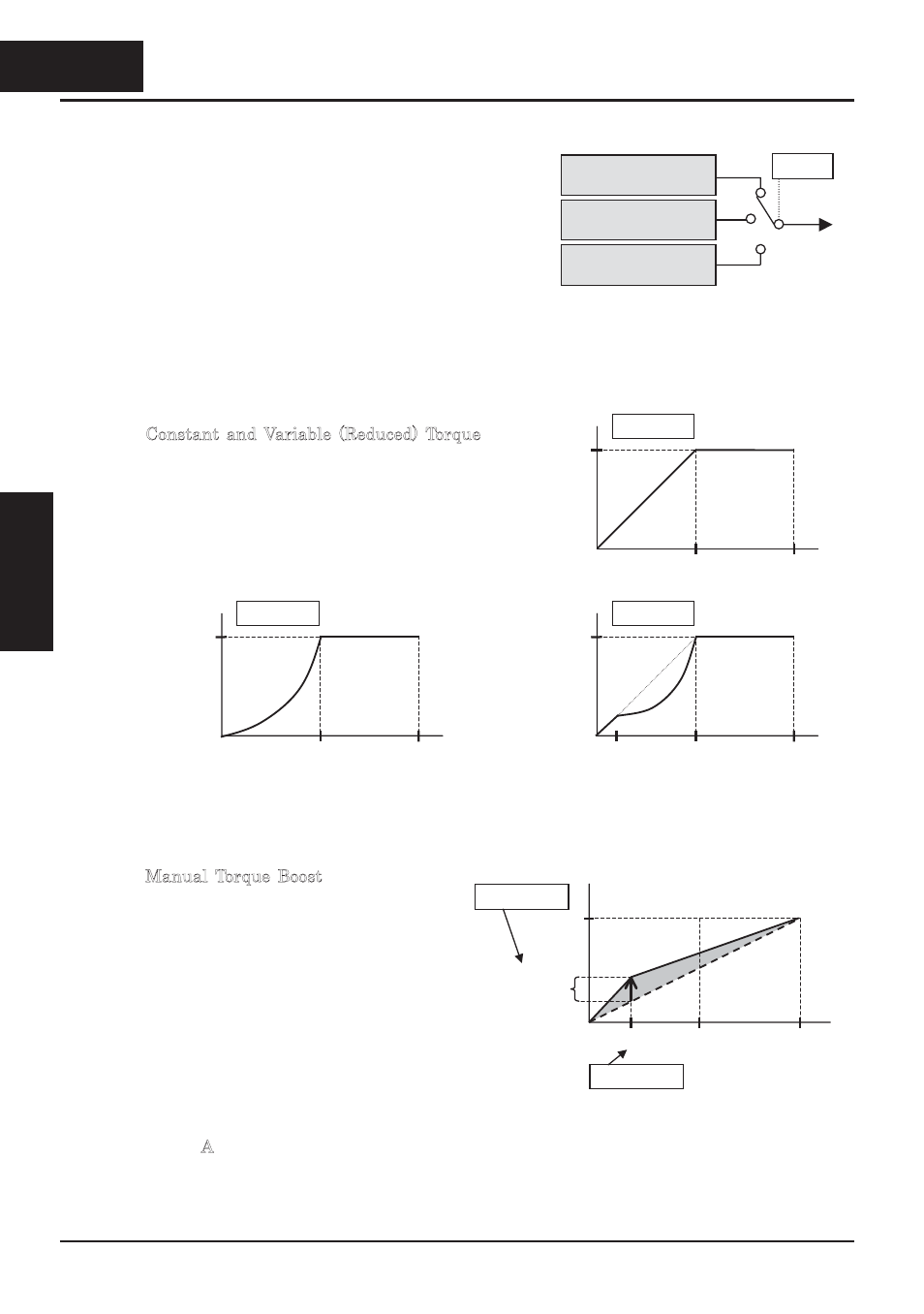
Torque Control Algorithms
The inverter generates the motor output according
to the V/f algorithm selected. Parameter A044
selects the inverter algorithm for generating the
frequency output, as shown in the diagram to the
right (A244 for 2nd motor). The factory default is
00 (constant torque).
Review the following description to help you choose the best torque control algorithm for
your application.
The built-in V/f curves are oriented toward developing constant torque or variable
torque characteristics (see graphs below). You can select either constant torque or
reduced torque V/f control.
Constant and Variable (Reduced) Torque – The
graph at right shows the constant torque
characteristic from 0Hz to the base frequency
A003. The voltage remains constant for output
frequencies higher than the base frequency. The
graph below (left) shows the general variable
(reduced) torque curve. The range from 0Hz to
the base frequency is the variable characteristic.
The graph above (right) shows the variable (reduced) torque curve, which has a
constant torque characteristic from 0Hz to 10% of the base frequency. This helps to
achieve higher torque at low speed with reduced torque curve at higher speeds.
Manual Torque Boost – The Constant
and Variable Torque algorithms
feature an adjustable
torque boost
curve. When the motor load has a lot of
inertia or starting friction, you may
need to increase the low frequency
starting torque characteristics by
boosting the voltage above the normal
V/f ratio (shown at right). The function
attempts to compensate for voltage
drop in the motor primary winding in
the low speed range.
The boost is applied from zero to the base frequency. You set the breakpoint of the boost
(point A on the graph) by using parameters A042 and A043. The manual boost is
calculated as an addition to the standard V/f curve.
3
16
Hz
100%
0
Base
freq.
V
Max.
freq.
A044 = 00
Constant torque
3
16
Config
uri
ng Driv
e
Parameters
00
06
01
Variable freq. control,
constant torque
Variable freq. control,
reduced torque1
Output
Inverter Torque Control Algorithms
A044
Variable freq. control,
reduced torque
Hz
100%
0
Base
freq.
V
Max.
freq.
A044 = 06
Variable torque
Hz
100%
0
Base
freq.
V
Max.
freq.
A044 = 01
Variable torque
10% Base
freq.
0
5% voltage
boost
(100%=A082)
A042 = 5 (%)
fbase = 60Hz
30Hz
V
100%
1.8Hz
A043 = 3 (%)
Hz
A
3
−16
&RQ¿JXULQJ'ULYH
Parameters