IAI America LSA User Manual
Page 12
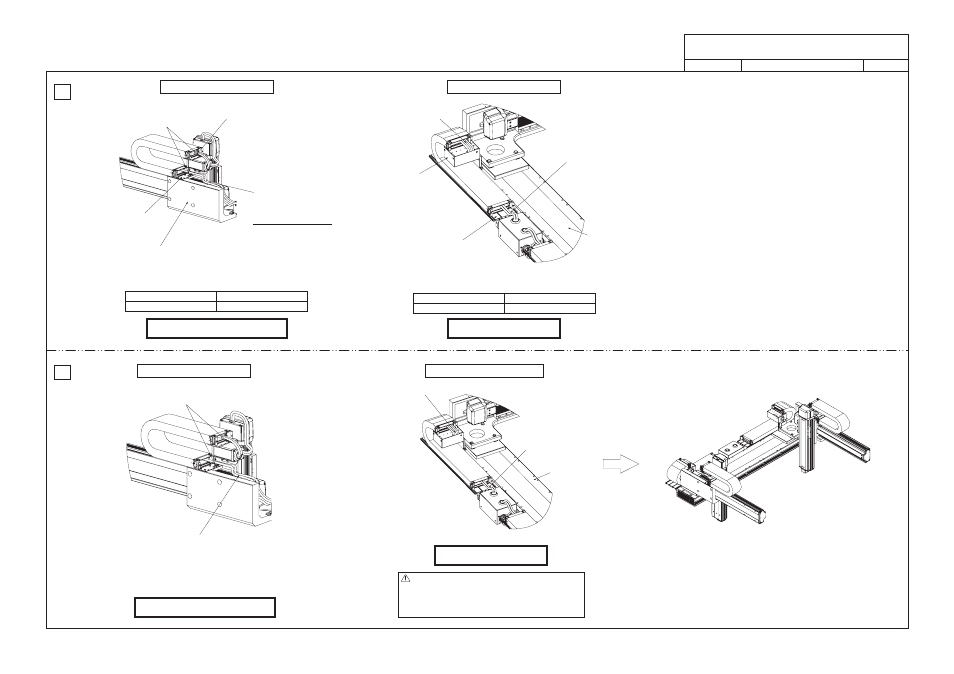
ICSPA6-B2L1HB3H (M)
Z1-axis cables
X-axis, Y1-axis, Z1-axis cables
Z1-axis cables
Secure the cables using wraps.
Secure the cables using wraps.
[13] Track support bracket
[14] Track mounting bracket 2
[1] XY bracket
Tie-mount KR5G5 (by HellermannTyton)
+ hexagonal socket head button bolt M4s6 (2 sets)
Tie-mount KR5G5
(by HellermannTyton)
+ hexagonal socket head button bolt
M4s6 (1 set)
Install in the T slot of the Y-axis.
[Installation of tie-mount in track mounting bracket 2 [14]]
[Installation of tie-mount on track support bracket [13]]
[Installation of tie-mount in T slot of Y1-axis: ISPA]
X-axis, Y1-axis cables
X-axis: LSA
Track mounting bracket
[3] Guide rail
Tie-mount KR5G5
(by HellermannTyton)
+ hexagonal socket head bolt
M4s6 (1 set)
Tie-mount KR5G5 (by HellermannTyton)
+ hexagonal socket head bolt M4s6
+ hexagonal nut (1 set)
[Installation of tie-mount on track mounting bracket]
[Installation of tie-mount in T slot of guide rail [3]]
X-axis: LSA
Secure the cables using wraps.
Secure the cables using wraps.
GMM07-071
4/4
Drawing No.
9
10
Assemble the Y2-axis side by referring
to the Y1-axis side.
*
Assemble the Y2-axis side by referring
to the Y1-axis side.
*
* The direction is different on the Z2-axis side.
Assemble the parts by referring to the Z1-axis side.
* The direction is different on the Z2-axis side.
Assemble the parts by referring to the Z1-axis side.
Tightening torque
M4s6mm
11.7kgfvcm/114Nvcm
Hexagonal socket head button bolt
Tightening torque
M4s6mm
11.7kgfvcm/114Nvcm
Hexagonal socket head button bolt
Caution: Secure the wires to prevent the cables and connectors
from contacting each axis when the axis is moved over its
entire stroke.
When manually moving the actuator with brake, connect
the controller, supply the power, and then release the brake
release switch (by turning the switch to the RLS side).
X-axis Linear Servo Type Cartesian Robot – High-precision 6-axis Specification,
Z Base Mount