Ocean Optics XYZ Mapping Tables User Manual
Page 17
3: Operating Instructions
000-10000-130-02-1209
9
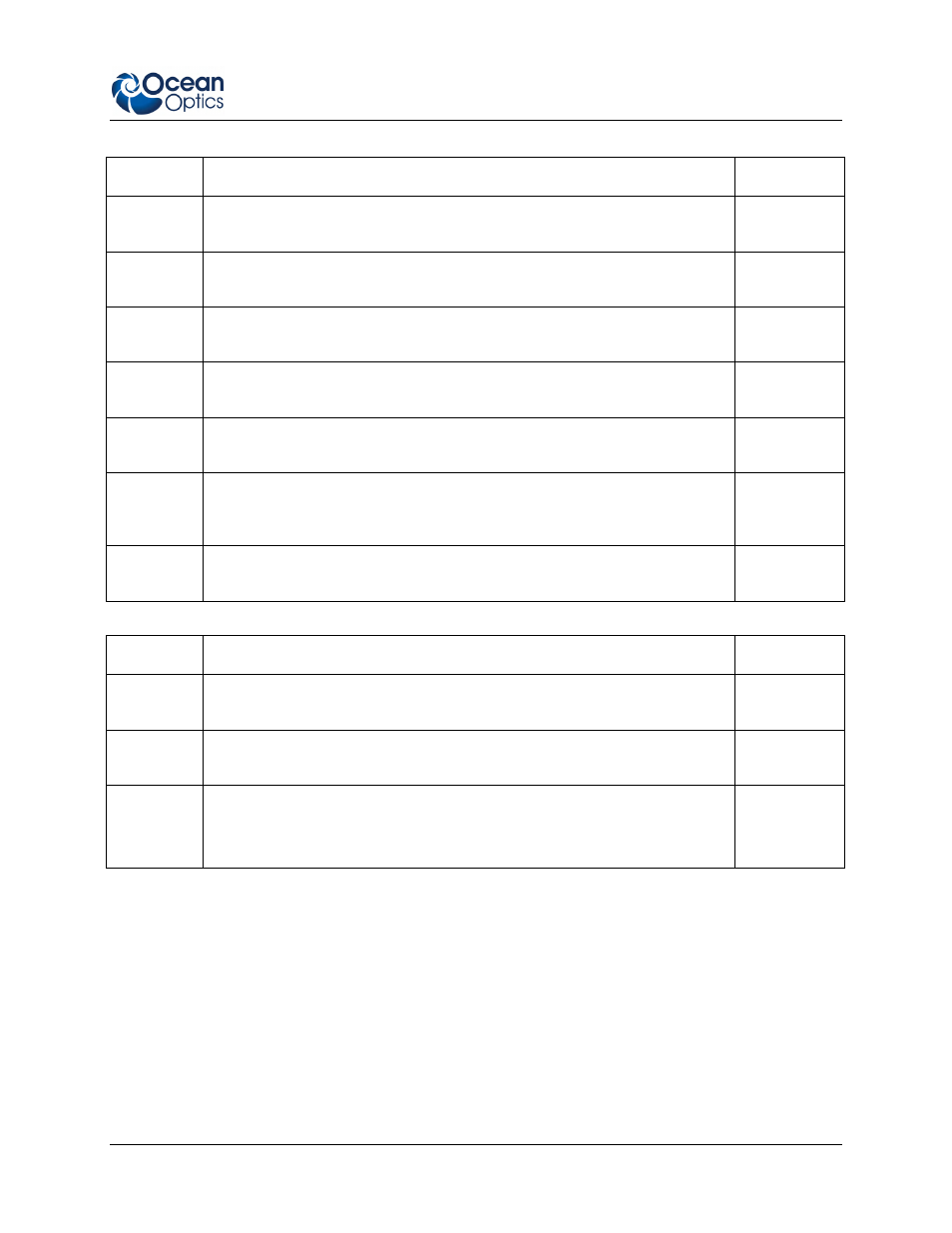
Commands for Motion Control
Command
Description
Example
M
Initiate motion
Activates positioning mode
M
LA
Load absolute position
Parameter: 1000 is equivalent to one complete rotation
LA5000
LR
Load relative position
Parameter: 1000 is equivalent to one complete rotation
LR11000
V
Select velocity mode
Activates velocity control and rotates with the given values
V200
GV
Get velocity
Calls up command velocity
GV
-> 200
NP
Notify position
Motor sends ”p” to the host terminal when the given position has been
passed. No parameter: ”p” is sent when target position is reached.
NP5000
Asynch -> p
NV
Notify velocity
When the motor reaches the given velocity it transmits ”v” to the host
NV200
Asynch -> v
Commands for Velocity Control
Command
Description
Example
MV
Minimum Velocity
Sets the minimum speed in rpm
MV30
GMV
Get minimum velocity
Calls up the minimum velocity
GMV
-> 30
SOR
Source for velocity
Chooses the source for velocity.
SOR0: velocity from RS232
SOR0
- Apex 785 Raman (1 page)
- STS-UV (2 pages)
- TR2 Engineering Note (4 pages)
- SAD500 Communications and Control (19 pages)
- Red Tide USB650 Install (26 pages)
- Fiber Optic Termination Kit (6 pages)
- Transmissive pH Probe (10 pages)
- Remora (42 pages)
- PlasCalc (59 pages)
- Correcting Device Driver Issues (8 pages)
- ecoVis Krypton Light Source (16 pages)
- LPC-500CM (28 pages)
- HPX-2000 (24 pages)
- ADC1000-USB (27 pages)
- Torus Operating Instructions (30 pages)
- ADC2000-PCI (13 pages)
- Sensors for Real-Time Analysis (2 pages)
- IDRaman reader (2 pages)
- DH-2000-CAL (30 pages)
- QE65 Pro (32 pages)
- Collimating Lenses (2 pages)
- D1000 (2 pages)
- IDRaman mini (2 pages)
- HR2000CG-UV-NIR (42 pages)
- Cool Red (1 page)
- HL-2000 (20 pages)
- XE-1 Xenon (6 pages)
- USB-ADP Serial Adapters (3 pages)
- CHEM2000 (36 pages)
- Deuterium-Halogen Calibration Light Source (19 pages)
- NeoFox Engineering Note (30 pages)
- QE Pro (2 pages)
- OOIBase32 (140 pages)
- AR-1 Argon (6 pages)
- pH Sensor Patches, Probes and Cuvettes (36 pages)
- SpecLine Offline Spectroscopy (60 pages)
- HL-2000-HP-232 (26 pages)
- External Triggering Options Instructions for Spectrometers with Firmware Version 3.0 and Above (16 pages)
- Breakout Box (10 pages)
- USB-ISS-UV_VIS (4 pages)
- ISS-UV_VIS (6 pages)
- OOIColor (14 pages)
- LS-1 Series (12 pages)
- Apex Install (24 pages)
- DH-2000 (34 pages)