Central h-infinity controller, Central h-infinity controller -4 – National Instruments Xmath Interactive Control Design Module ICDM User Manual
Page 73
Chapter 8
H-Infinity Synthesis
Xmath Interactive Control Design Module
8-4
ni.com
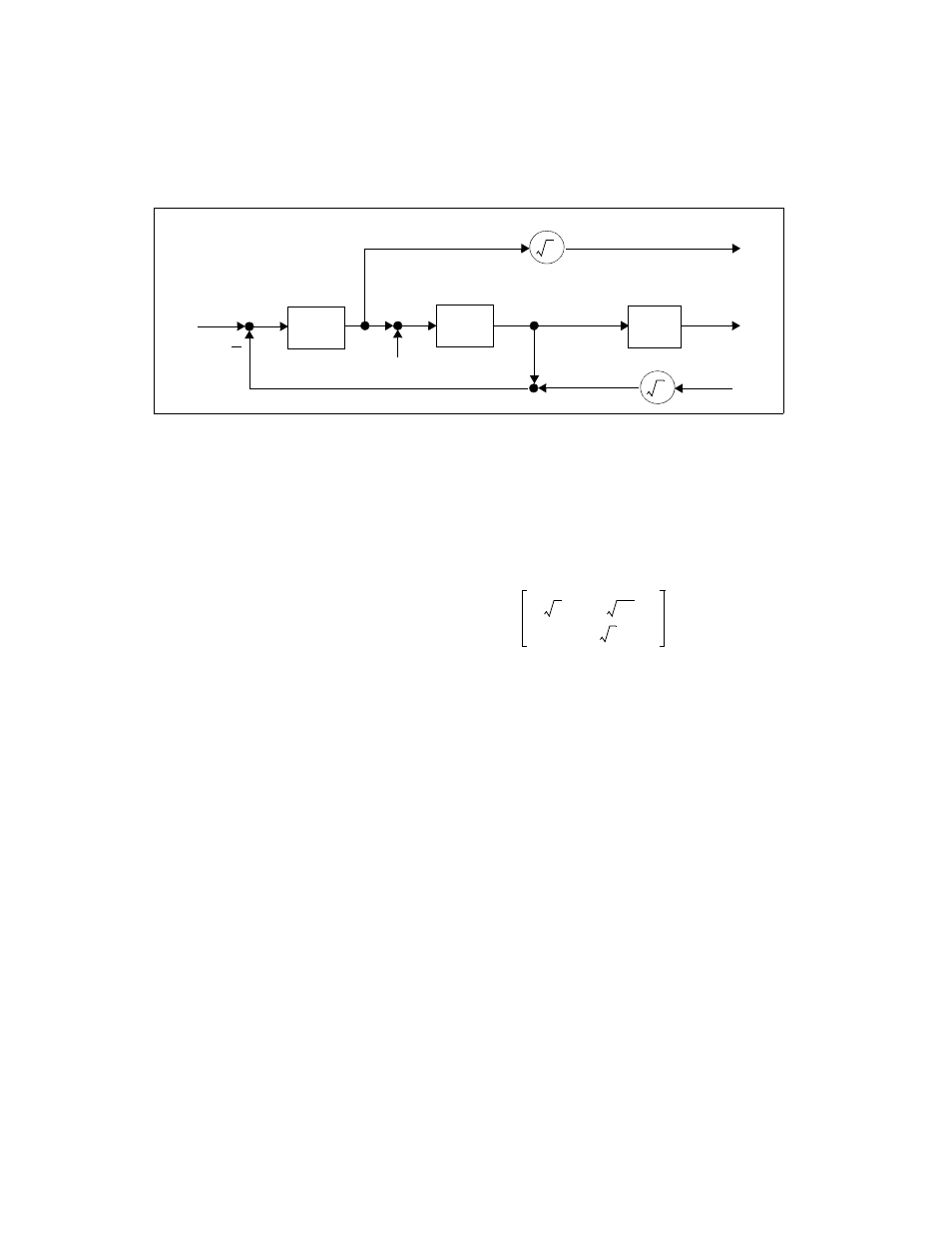
Figure 8-2. Block Diagram Showing the Basic Setup for H-Infinity Synthesis
Figure 8-2 shows a block diagram with the basic setup for H
∞ synthesis
where closed-loop transfer matrix H relates the two exogenous inputs w
1
and w
2
to the two outputs z
1
and z
2
.
The design is based on H, the closed-loop transfer matrix relating the noises
w
1
and w
2
to the signals z
1
and z
2
. H is given by the following equation:
The entries of the closed-loop transfer matrix can be interpreted as the
(normalized) transfer functions from the process and sensor noises to
the actuator and output, respectively.
The singular values of H are shown in the top left plot of the H
∞ Synthesis
window.
Central H-Infinity Controller
The controller C is chosen to minimize the
γ-entropy of the closed-loop
transfer matrix H, given by:
where
σ
1
and
σ
2
are the singular values of H(j
ω).
P(s)
r=0
W(s)
y
C(s)
u
w
1
w
2
z
1
z
2
H
1
1 PC
+
-----------------
ρPC
–
ρυC
–
PW
νPCW
–
=
I
γ
H
( ) γ
2
π
----
1
1
σ
1
ω
( )
γ
⁄
(
)
2
–
------------------------------------
1
1
σ
2
ω
( )
γ
⁄
(
)
2
–
------------------------------------
log
+
log
⎝
⎠
⎜
⎟
⎛
⎞
d
ω
0
∞
∫
=