Figure 13-3. standard feedback connection – National Instruments Xmath Interactive Control Design Module ICDM User Manual
Page 115
Chapter 13
Multi-Loop Synthesis
Xmath Interactive Control Design Module
13-4
ni.com
one loop at a time. The loops that are not closed are considered to have
a transfer function equal to zero. During the design phase, the user can
modify, delete, disable, or enable controller components of loops that were
designed earlier.
When the user is designing a controller for one specific sensor and one
specific actuator of a multivariable plant, this SISO plant has no obvious
direct relationship with the original multivariable open-loop transfer
function. The reason for this is that each of the earlier designed controller
components results in a modified transfer function for all other pairs of
sensors and actuators.
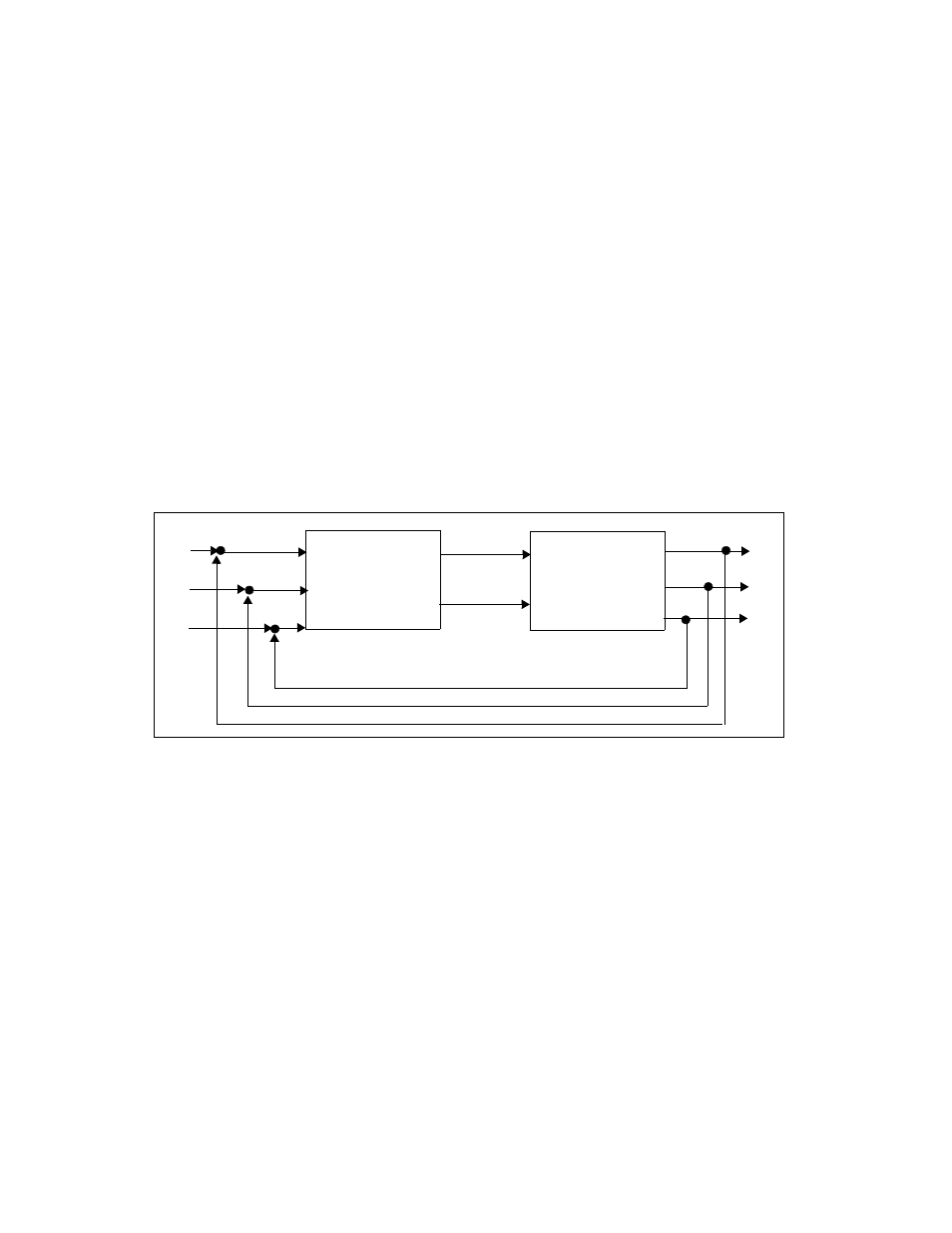
For example, consider the case of a plant with two actuators and three
sensors in Figure 13-3. This figure shows standard feedback connection,
with scalar signals shown, for a plant with three sensors (outputs) and two
actuators (inputs).
Figure 13-3. Standard Feedback Connection
Suppose that at some moment in the design phase, two loops have been
closed—one from the first sensor to the first actuator, and one from the third
sensor to the second actuator as shown in Figure 13-4.
In Figure 13-4, the two SISO controllers have been labeled C
(1)
and C
(2)
,
respectively. When at some moment you are editing (modifying, deleting,
disabling, or enabling) controller C
(1)
, the transfer function of the
corresponding SISO plant is that of P
equiv
as shown in Figure 13-5, so that
P
equiv
is the SISO-equivalent plant resulting from cutting the loop between
the first sensor and the first actuator. P
equiv
thus depends on which loop you
are designing.
y
1
C
–
P
u
1
r
1
r
2
r
3
–
–
u
2
y
2
y
3
e
1
e
2
e
3