Compass deviation – Simrad AP25 User Manual
Page 119
Configuration and setup
20221495F
117
The calibration should be done in calm sea conditions and with
minimal wind to obtain good results. Use about 60-90 seconds to
make a full circle.
Increase speed:
>>>>>
Decrease speed: <<<<<
Appropriate speed: > <
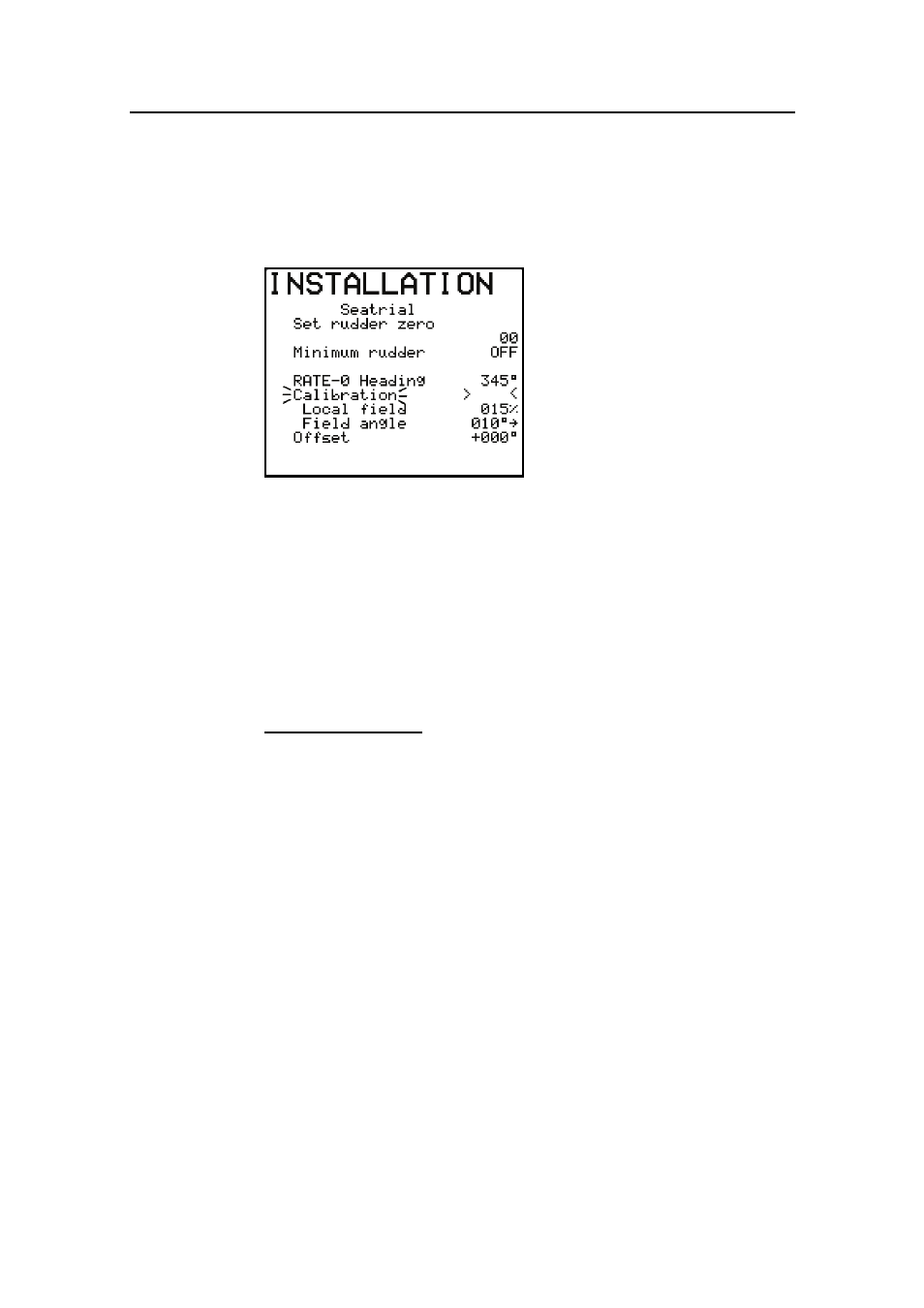
1. Select the ‘Calibration’ item on the display
2. Begin turning the boat (port or starboard).
3. Confirm start of calibration by turning the course knob
clockwise. The display will flash “Calibrating”. Establish
your turning rate using the arrows in the display.
4. When the calibration is completed, (after having made
approximately 1 1/4 turns), it will be confirmed by the display
reading “Confirmed”.
Compass deviation
The heading from a magnetic heading sensor will normally have
a deviation when compared with the actual direction of the
earth’s magnetic field. This is caused by interference from the
boat’s local magnetic field. The deviation will be at a minimum
if the compass is placed as far as possible from any magnetic
object on board. On the other hand, you may have to
compromise with other requirements for the installation of the
compass (page 79).
During the calibration, the compass will measure the magnitude
and direction of the local magnetic field from where the compass
is mounted. The magnitude is given in % of the magnitude of the
earth’s magnetic field. If the local magnetic field is stronger than
the earth’s magnetic field (the local field is reading more than
100%), the compass calibration will fail. If the local field is
reading more than 30%, you should look for any interfering
magnetic objects and remove them, or you should move the