Hudson Robotics SOLO User Manual
Page 42
42
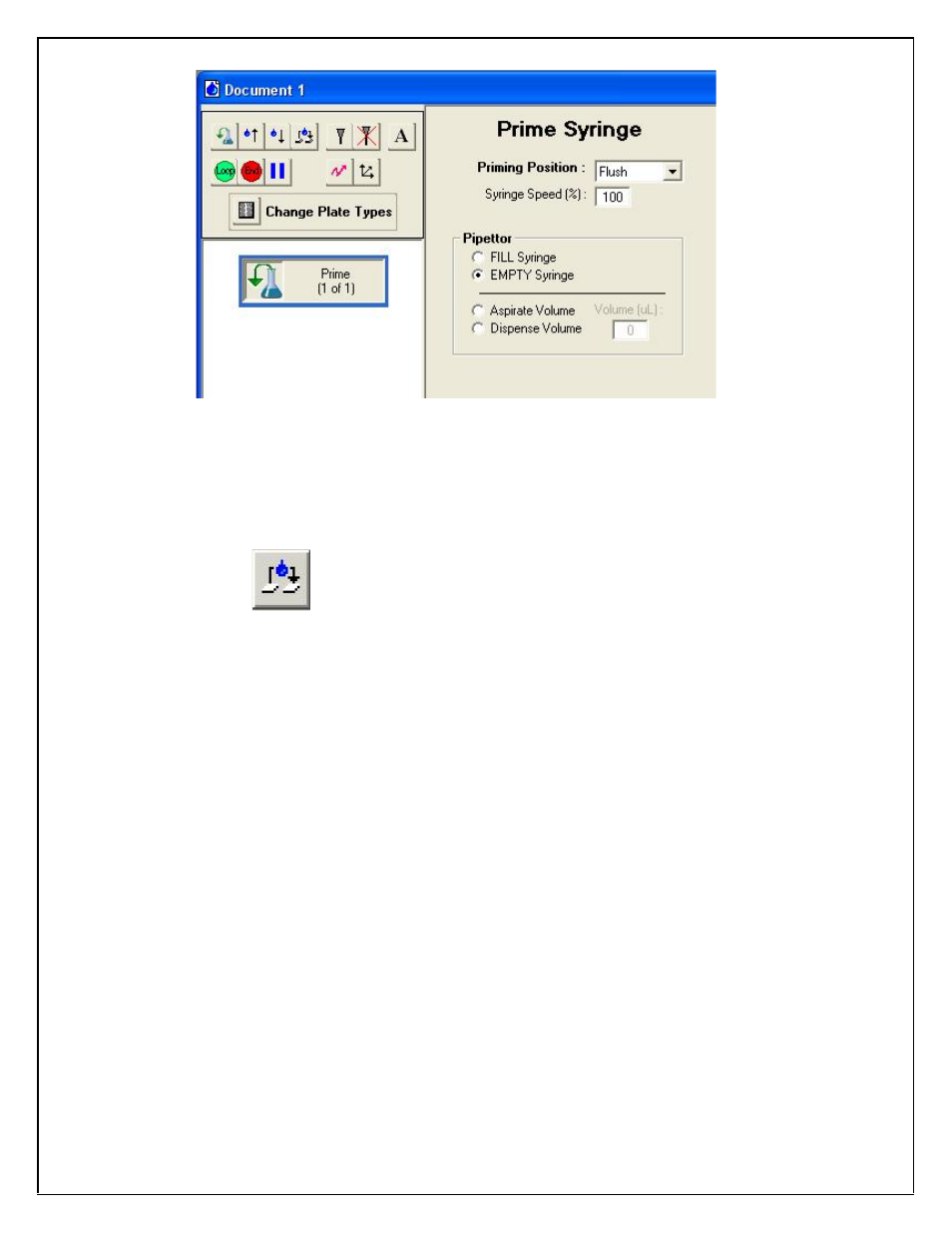
The user make elect to position the syringe piston at the very top of its stroke
(FILL) or position it at the bottom of its stroke (EMPTY). Alternatively, the
syringe may be moved by a selected amount (in uL), either up (Aspirate) or down
(Dispense).
3.11 – HitPick Step (available ONLY for single-tip operation modes)
The HitPick Step provides the user with a convenient way to consolidate the
contents of selected wells from one or more source plates into one or more target
plates. This step can be used for cherry-picking, rearraying and re-formatting
from one size plate to another. The HitPick step is setup much as if it were an
Aspirate Step and a Dispense Step combined into one. The user chooses the
syringe selection, syringe speed, X,Y,Z offsets and Tip Touching are similar to
those in the Aspirate and Dispense Steps described above, and are not repeated
here. The user must select the Source plate’s position (out of the available plate
nest positions 1 through 6) and the target plate’s position. These selections will
also define the type of plate that will be present at each of these positions while
running, just as in the Aspirate or Dispense Steps above. The major differences
between the HitPick Step and the Aspirate or Dispense Steps are:
a. The Source plate’s data ALWAYS comes from a .CSV file, for which
the user selects the folder where the source file(s) will be found.
b. The Target plate’s information is derived from a “blocking” pattern
that is stored with the method.
c. The user selects an Output file and file path where the transfer
information is to be stored (the same file for all plates in a run).
There must be a separate source file for each Source plate, where that file’s name
is SourcePlateBarcode.csv. For instance, if that Source plate’s barcode is