Hudson Robotics SOLO User Manual
Page 34
34
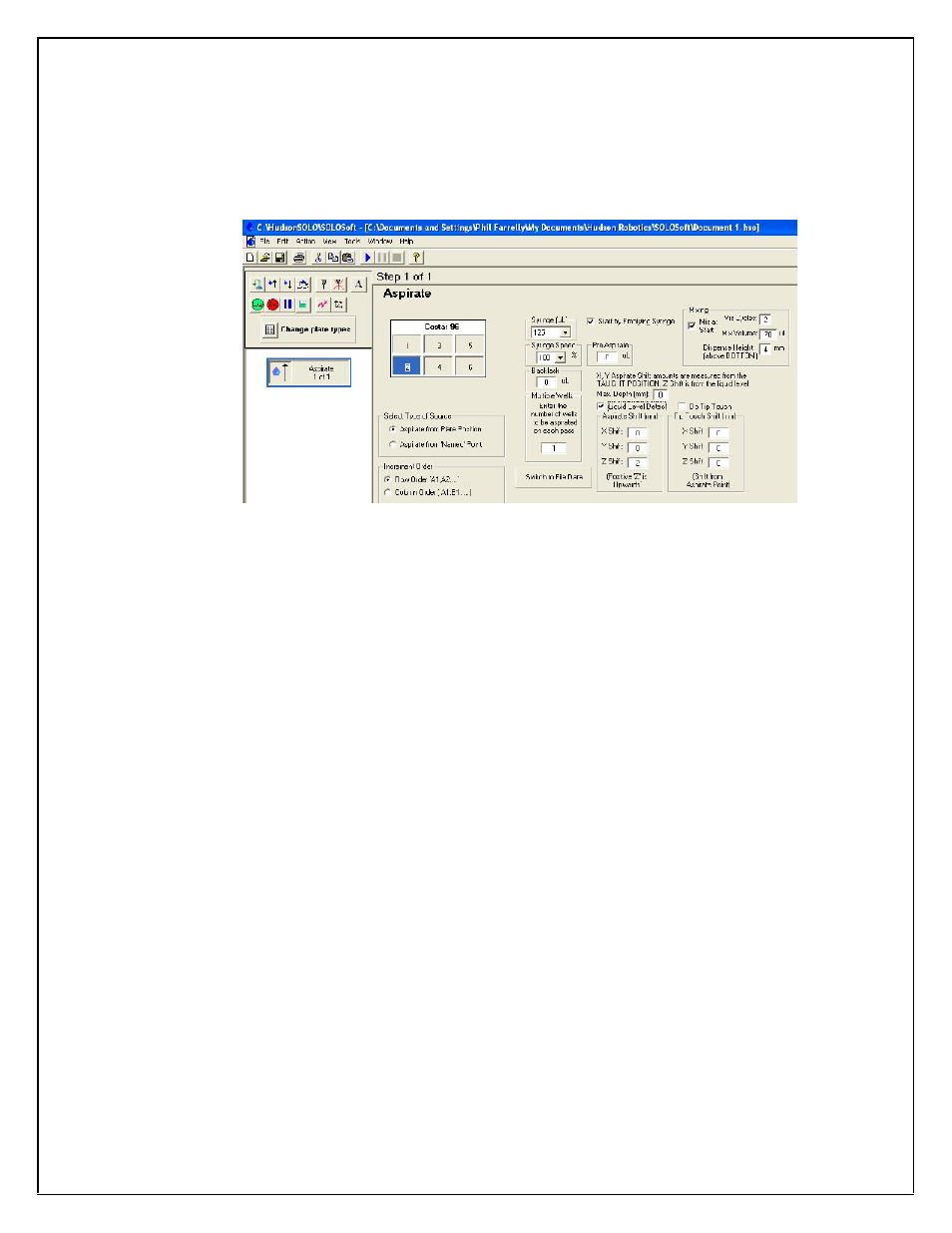
upper rim of the well or vessel, below which it will not proceed if no
liquid is detected. If aspirating from a defined microplate, and the
entered “Max. Depth” value exceeds the Plate Depth value, that plate’s
Plate Depth value will be used, so as not to drive the tip beyond the
bottom of the well. A typical display showing the Liquid Level Detect
feature is shown below:
When using liquid level detection, the “Z-shift” value in the “Aspirate
Shift” box indicates the distance to move the tip below the detected
liquid level prior to aspirating.
If the tip reaches the “Max. Depth” position without detecting liquid,
the Aspirate step will end and SOLOSoft will perform its next action.