Hudson Robotics SOLO User Manual
Page 22
22
Calibrate Deck… –
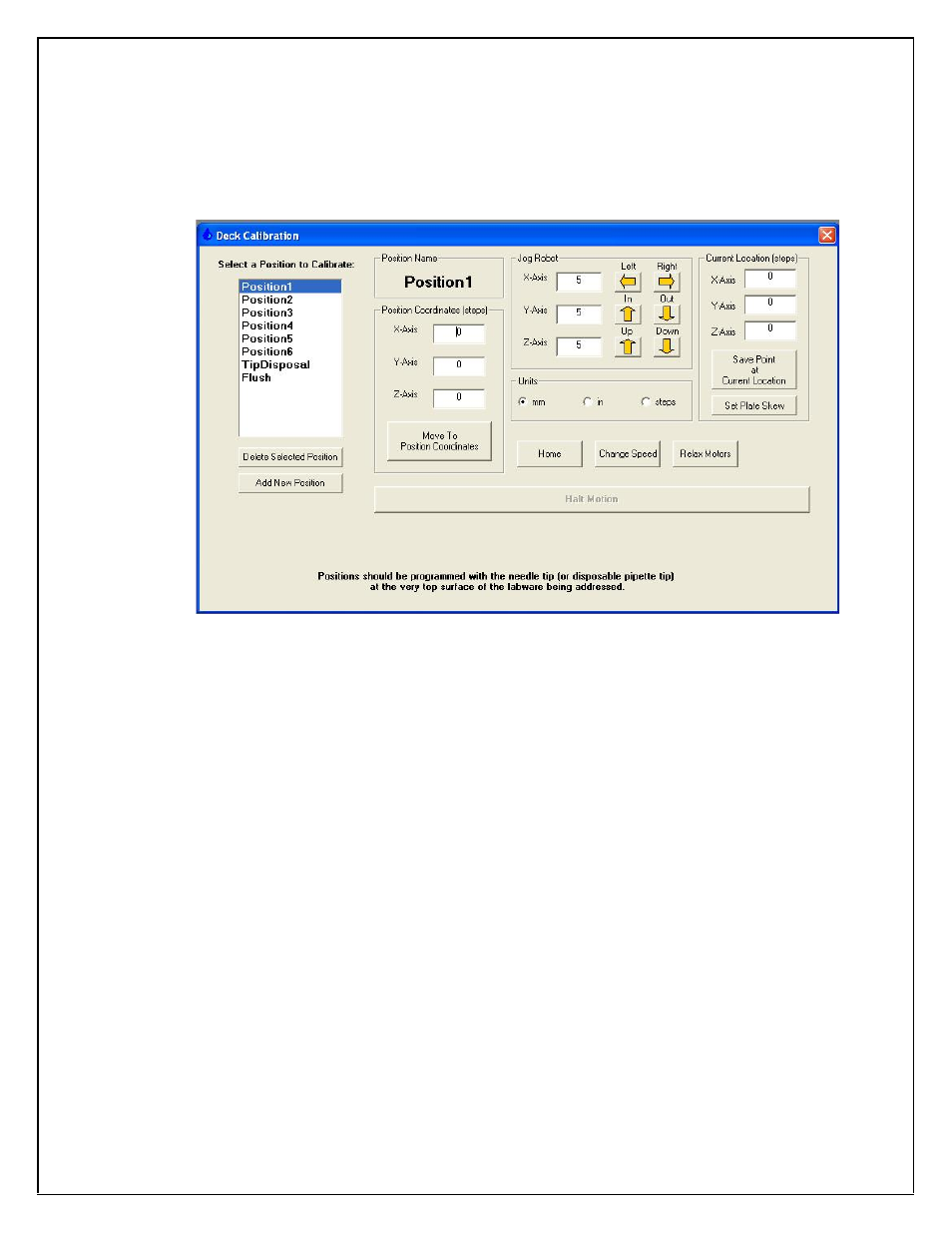
This option allows the user to create, teach, save or delete robot positions
within the working area of the SOLO’s 3-axis robot arm, as well as to jog the
arm within that work area. Clicking this option will produce the following
screen display:
The first 8 position names in the list are PERMANENT and cannot be deleted,
however, the user can re-locate them anywhere within the work area of the
robot, however they are intended to be located properly for use in the SOLO’s
plate nests and tip shucking/flushing stations as follows:
Position1 – the left hand rear plate-nest location. It should be
programmed with a disposable tip pressed onto the syringe tip mandrel
(in the case of a SOLO with this option), or using the fixed tip. It is
intended to be programmed with a 384-well plate. Align the tip between
locations A1,A2,B1, and B2. This simulates the center of well A1 in a
96-well plate located in that nest position ‘A1’ being located in the rear
left corner of the plate-nest. Upon clicking
the “Save Point…” screen button, SOLOSoft will save this point
name with the current X- and Y- axis coordinates, and set
the Z coordinate equal to the Z-axis’ current ‘travel height’
setting. This Z-axis setting applies to all 4 (or 6, for
Portrait layout) of the plate-nest positions listed here.
Position2 – the lefthand front plate-nest position.
Position3 – the middle rear plate-nest position.
Position4 – the middle front plate-nest position.
Position5 – the righthand rear plate-nest position.
Position6 – the righthand front plate-nest position.
Flush – located with the tip in or above the waste drain fixture.