Elmo SERVO AMPLIFIER DBP SERIES User Manual
Page 87
86
DBP - Rev 6/93
7.2 Setting the main optical encoder format
When a differential encoder is used:
Set DS 2,3,6 to OFF
Otherwise they should be ON.
7.3 Setting the R/D circuit
Set DS 2,3,6 to ON
The Resolver interface circuit consists of three basic blocks:
R/D converter
The R/D conversion is done by a variable resolution, monolithic converter
type 2S82 of Analog Devices. It accepts two signals from the Resolver (sine and
cos.) and converts them into binary position data bits. The resolution of the
position bits is user selectable 10, 12 ,14 and 16 (only for standard encoder
resolution). In addition, the R/D creates a signal that is proportional to the
Resolver velocity. This signal is being used as a velocity feedback.
EPROM
The EPROM creates "Hall" signals by mapping the position data bits accepted
from R/D into suitable Hall signals to operate a specific brushless motor. In
addition, the encoder index (marker) signal is also produced from the EPROM.
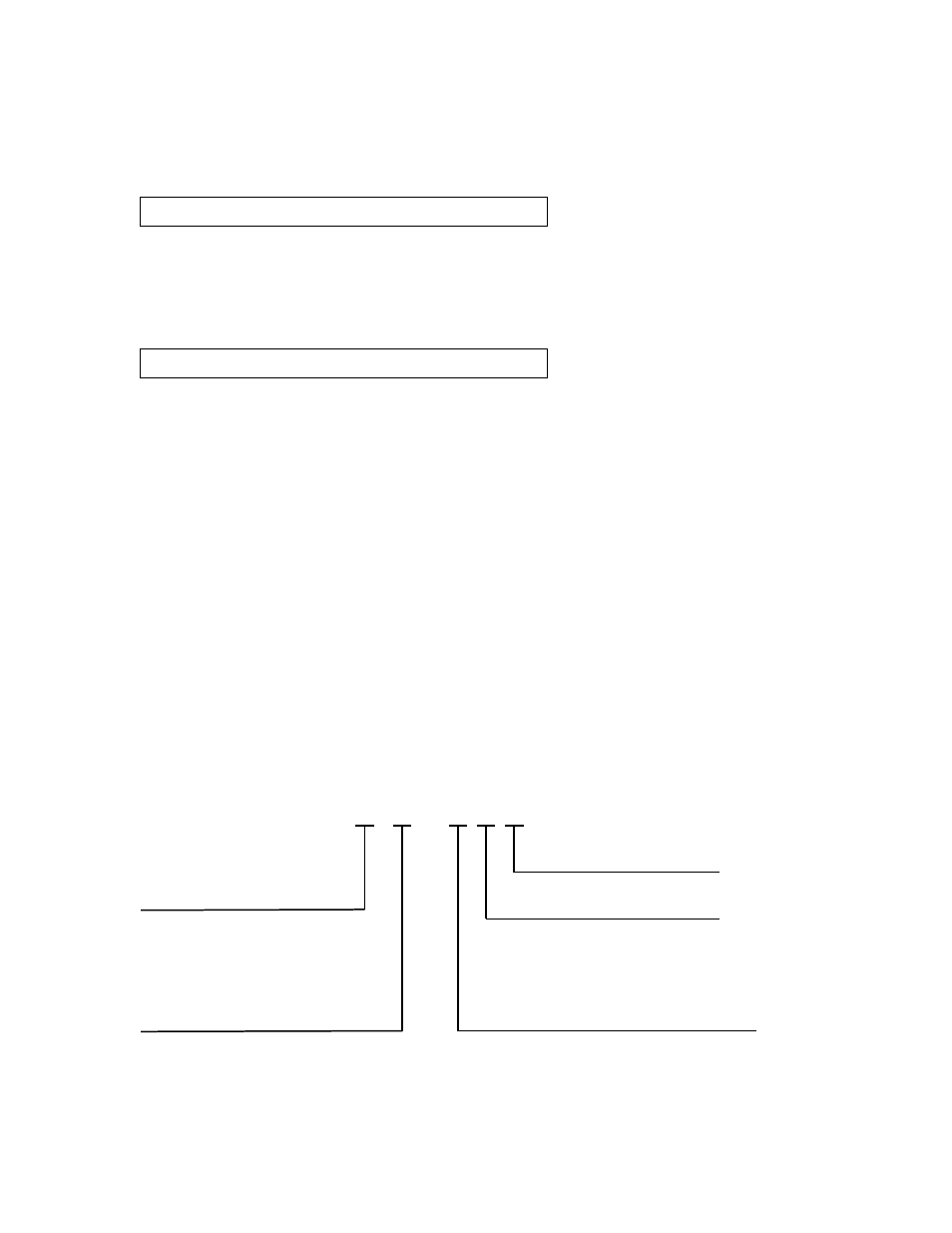
The EPROM is designated as follows:
2 4 X S STD
Resolver's poles number
Ratio of motor/resolver
poles numbers
Encoder resolution
Commutation address
R/D resolution
X=User selectable, 0=10 bits
2=12 bits, 4=14 bits, 6=16 bits
In the S (standard) version zero crossing of phases B C occurs at position
address "0" of the Resolver.