9 process data objects (pdo) – Yaskawa SI-ES3 for V1000 User Manual
Page 30
9 Process Data Objects (PDO)
EN 30
YASKAWA Europe YEU TOEP C710606 98A - V1000 Option EtherCAT - Installation Manual
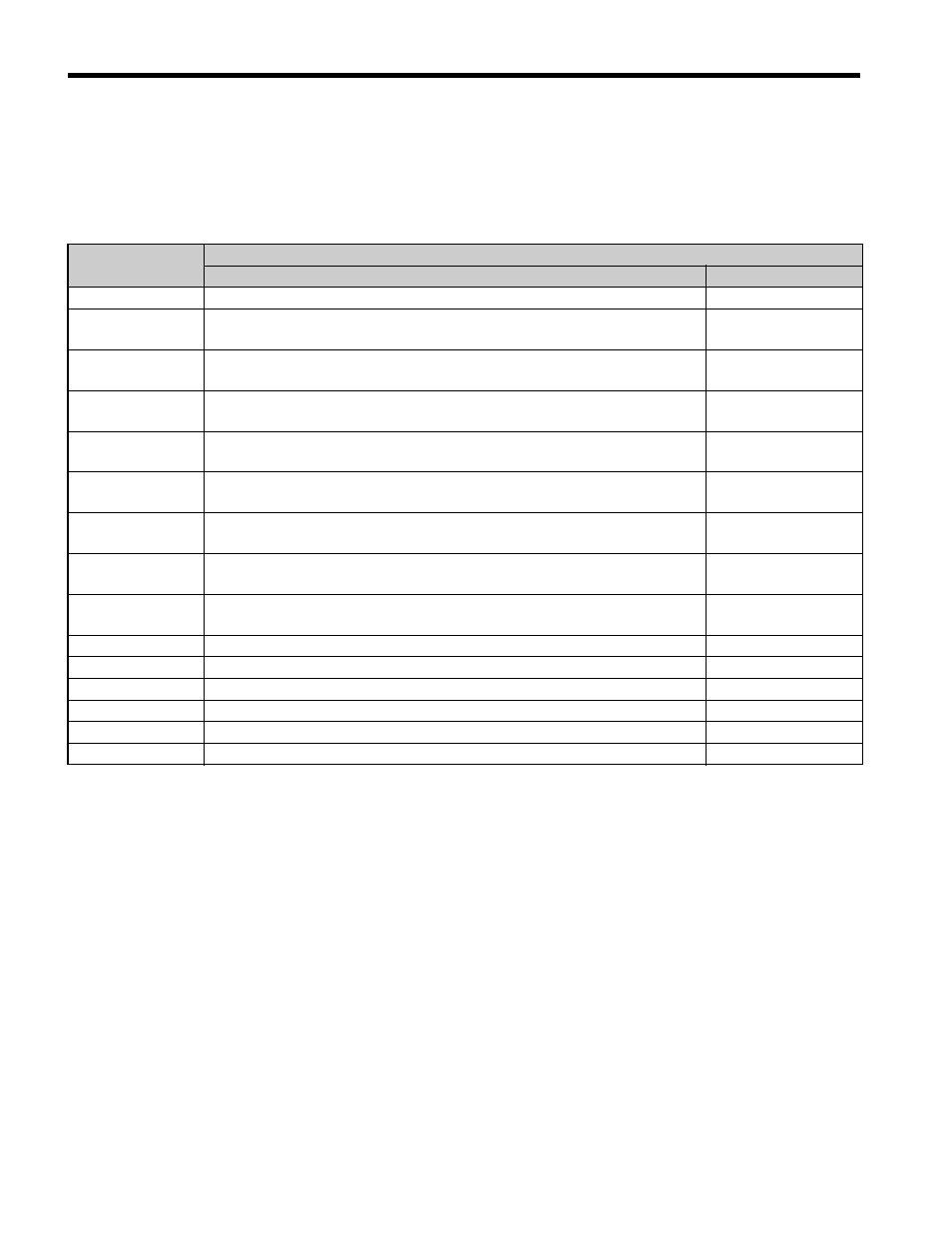
Receive PDOs (RxPDO)
The Receive PDOs have a default mapping according to the table below. The end user can
re-map Receive PDOs by writing to the map objects 0x1600-1628, refer to
n Communication Profile Objects (DSP 301).
PDO number
Receive PDO Mapping
Mapped objects (Hex)
Index (Hex)
1
Sub-index 1: 0x6040#0, 2-bytes (DSP402 control word)
0x1600
2
Sub-index 1: 0x6040#0, 2-bytes (DSP402 control word)
Sub-index 2: 0x6060#0, 1-bytes, (DSP402 Modes of operation)
0x1601
6
Sub-index 1: 0x6040#0, 2-bytes (DSP402 control word)
Sub-index 2: 0x6042#0, 2-bytes, (vl target velocity)
0x1605
7
Sub-index 1: 0x6040#0, 2-bytes (DSP402 control word)
Sub-index 2: 0x60FE#1, 4-bytes, (Physical digital outputs)
0x1606
8
Sub-index 1: 0x6040#0, 2-bytes (DSP402 control word)
Sub-index 2: 0x6060#0, 1-bytes, (DSP402 Modes of operation)
0x1607
21
Sub-index 1: 0x6048#1, 4-bytes (vl Accel delta speed)
Sub-index 2: 0x6048#2, 2-bytes, (vl Accel delta time)
0x1614
22
Sub-index 1: 0x6049#1, 4-bytes (vl Decel delta speed)
Sub-index 2: 0x6049#2, 2-bytes, (vl Decel delta time)
0x1615
23
Sub-index 1: 0x604A#1, 4-bytes (vl quick-stop delta speed)
Sub-index 2: 0x604A#2, 2-bytes, (vl quick-stop delta time)
0x1616
24
Sub-index 1: 0x604C#1, 4-bytes (vl Dimension factor)
Sub-index 2: 0x604C#2, 4-bytes, (vl Dimension factor)
0x1617
36
Sub-index 1: 0x2000#1, 2-bytes (Operation command)
0x1623
37
Sub-index 1: 0x2010#1, 2-bytes (Speed reference/limit)
0x1624
38
Sub-index 1: 0x2020#1, 2-bytes (Torque reference/limit)
0x1625
39
Sub-index 1: 0x2030#1, 2-bytes (Torque compensation)
0x1626
40
Sub-index 1: 0x2040#1, 4-bytes (MEMOBUS/Modbus read request)
0x1627
41
Sub-index 1: 0x2050#1, 4-bytes (MEMOBUS/Modbus write request)
0x1628