8 mechatrolink-ii commands, Main commands, 8mechatrolink-ii commands – Yaskawa 1000 Series Drive Option - MECHATROLINK-II Technical Manual User Manual
Page 18: Nop: 00h (no operation), Prm_rd: 01h (read parameter)
18
YASKAWA ELECTRIC SIEP C730600 50A YASKAWA AC Drive-Option Card MECHATROLINK-II Technical Manual
8 MECHATROLINK-II Commands
8
MECHATROLINK-II Commands
Main Commands
NOP: 00H (No Operation)
Only the ALARM and STATUS fields of the response data can be monitored. This command can be used in all phases.
PRM_RD: 01H (Read Parameter)
The PRM_RD command is used to read the Drive internal parameters. For offline parameters, it reads the most recently
updated setting values. This command can be used in all phases.
In the following cases, a warning (STATUS (WARNG) = 1) is generated and the command is ignored. If a warning is
generated, the values that are read are undefined.
• If a register number (NO) fault occurs: Data setting warning (A.94)
• If SIZE is an odd number or is not between 2 and 8: Data setting warning (A.94)
The register number (NO) is the same as the register number that is set and referenced in MEMOBUS/Modbus transfers.
Set the lower byte (LSB) before setting the upper byte (MSB). The SI-T3 stores the data read for PARAMETER from
lower byte (LSB) to upper byte (MSB). Refer to drive technical manual for detail.
For SIZE, set the number of bytes to be read as an even numbers. Eight bytes can be specified.
The values for the number (NO) and the size (SIZE) in the response data are copies of the values in the command data.
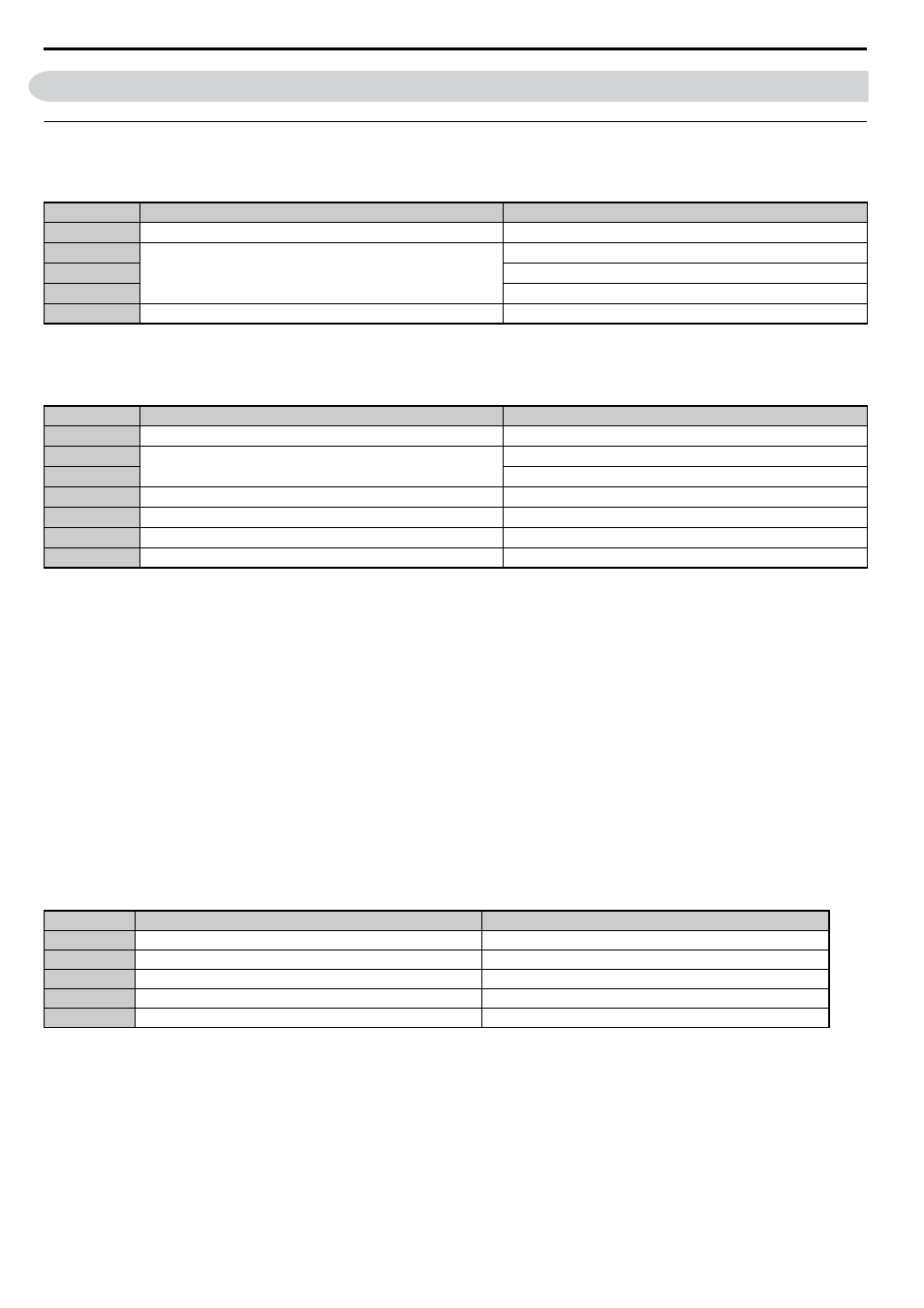
Example when reading C1-01 (200H):
Table 8 Example when reading C1-01 (200H)
Byte
Command
Response
1
NOP
NOP
2
0
ALARM
3, 4
STATUS
5 to 15
0
16
WDT
RWDT
Byte
Command
Response
1
PRM_RD
PRM_RD
2
0
ALARM
3, 4
STATUS
5, 6
NO
NO
7
SIZE
SIZE
8 to 15
0
PARAMETER
16
WDT
RWDT
Byte
Command
Response
5
00
00
6
02
02
7
02
02
8
00
Lower byte of C1-01
9
00
Upper byte of C1-01