Table 29: registers for drift compensation – BECKHOFF EtherCAT Technology Section I User Manual
Page 77
Distributed Clocks
Slave Controller
– Technology
I-57
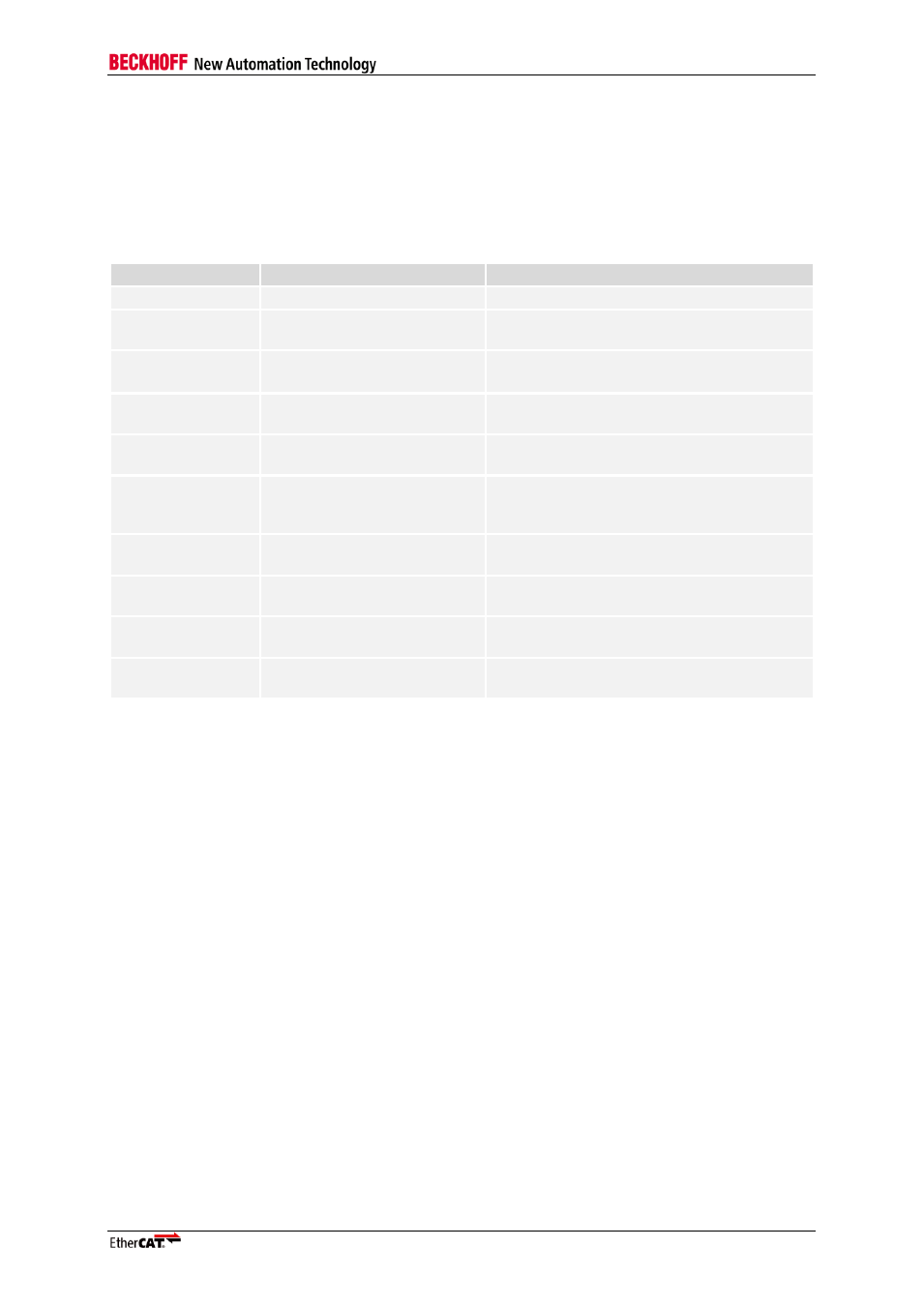
The System Time Difference Filter Depth register (0x0934) and the Speed Counter Filter Depth
register (0x0935) set filter depths for mean value calculation of the received System Times and of the
calculated clock period deviations.
Registers used for Control Loop/Drift Compensation are listed in Table 29.
Table 29: Registers for Drift Compensation
Register Address
Name
Description
0x0900:0x090F
Receive Time Port n
Local time when receiving frame on Port n
0x0918:0x091F
Receive Time ECAT
Processing Unit
Local time when receiving frame for ECAT
Processing Unit
0x0910:0x0917
System Time
Local copy of System Time (read from PDI)
(local time if System Time Offset=0)
0x0920:0x0927
System Time Offset
Time difference between System Time and
local time
0x0928:0x092B
System Time Delay
Delay between Reference Clock and the
ESC
0x092C:0x092F
System Time Difference
Mean difference between local copy of
System Time and received System Time
values
0x0930:0x0931
Speed Counter Start
Bandwidth for adjustment of local copy of
System Time
0x0932:0x0933
Speed Counter Diff
Deviation between local clock period and
Reference Clock’s clock period
0x0934
System Time Difference Filter
Depth
Filter depth for averaging the received
System Time deviation
0x0935
Speed Counter Filter Depth
Filter depth for averaging the clock period
deviation