2 digital i/o communications, Signal handshake – Adept AnyFeeder User Manual
Page 44
Chapter 4 - Using the AnyFeeder with Digital I/O
44
Adept AnyFeeder User’s Guide, Rev. B
4.2
Digital I/O Communications
This section describes the Adept AnyFeeder system digital I/O communications.
Signal Handshake
Communication works on the basis of a master/slave relationship. For a given situation,
the master sends the Adept AnyFeeder a command, the Adept AnyFeeder confirms
reception of the command, executes it, and reports the status back to the master (whether
the command completed successfully or not).
As viewed from the robot/controller (master) side, the digital I/O interface consists of 12
digital outputs and 8 digital inputs (see
• The 12 outputs are used by the master controller to send the Adept AnyFeeder an
action command or set a parameter.
• The 8 inputs return information about the Adept AnyFeeder status and report if an
action has been completed.
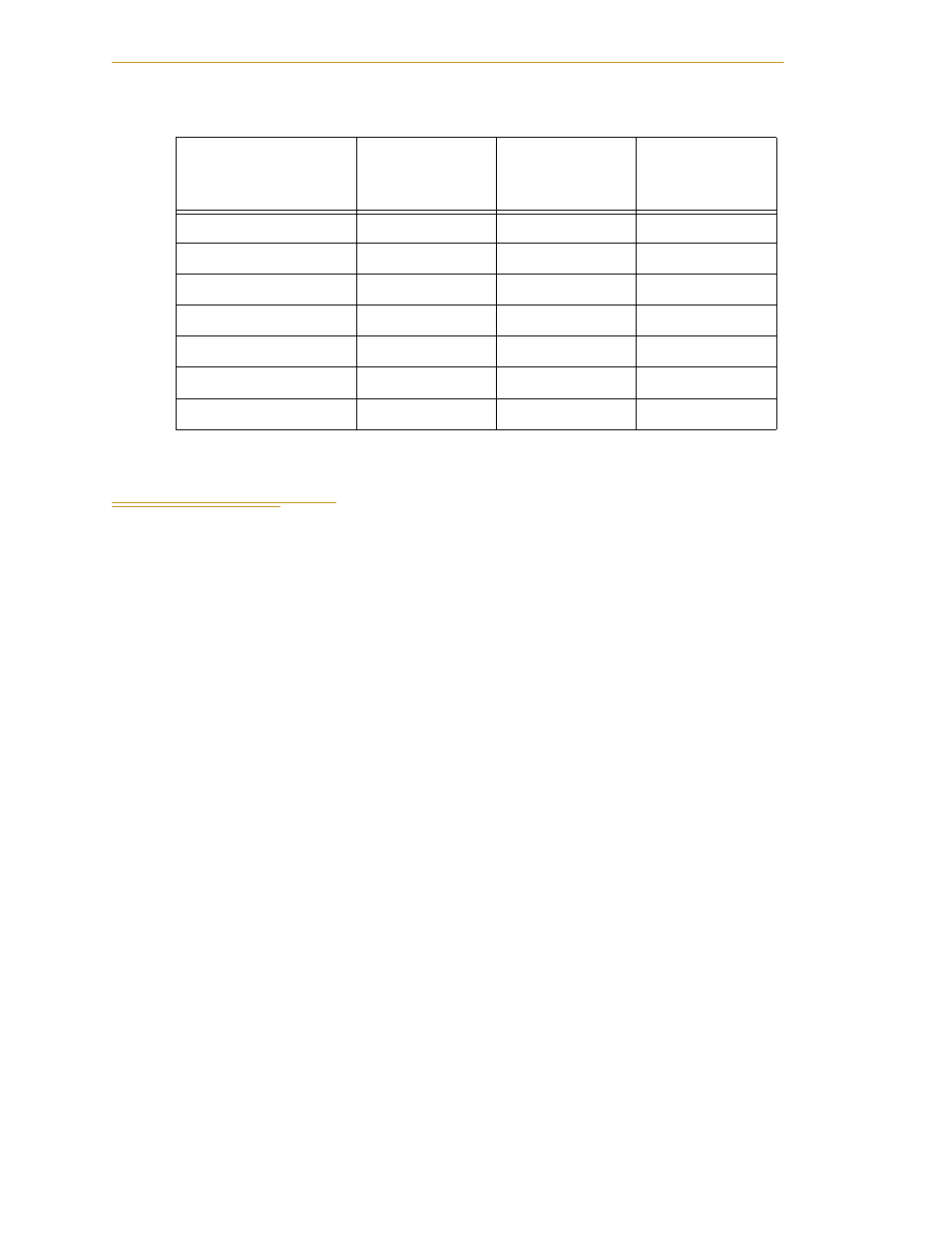
IN 8
8
RD
OUT 8
IN 9
22
BN / BU
OUT 9
IN 10
9
BK
OUT 10
IN 11
23
WH / RD
OUT 11
IN 12
10
VT
OUT 12
not used
11
GY / PK
not used
Shield, ground to case
N/A
BK
Table 4-1. Digital I/O Wiring Assignments
AnyFeeder Function
AnyFeeder Pin #
DSUB 25
Wire Color
Power Supply/
SmartController
Function