Adept AnyFeeder User Manual
Page 34
Chapter 3 - Using the AnyFeeder with Serial Communications
34
Adept AnyFeeder User’s Guide, Rev. B
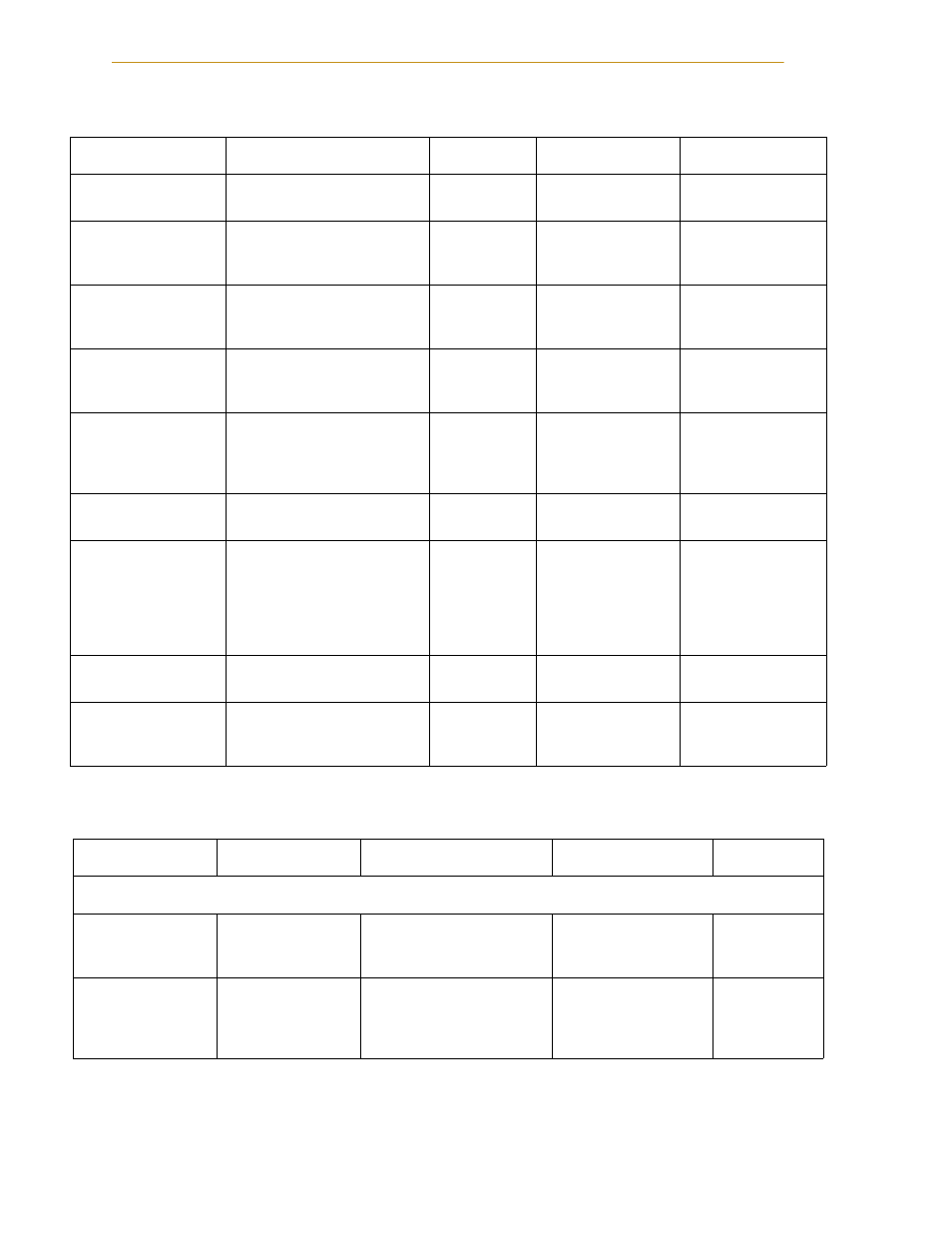
Flip [flip]
Flip parts without moving
forward or backward
> x=5
Executes a flip
Standard response
Dispense [dispense]
Move parts from the bulk
container onto the feed
surface
> x=6
Executes a
dispense
Standard response
Purge [purge]
Feed parts out backwards,
purge gate must be opened
manually
> x=7
Executes a purge
Standard response
Heavy Dispense
[hdisp]
Aggressively move parts from
bulk container onto feed
surface
> x=8
Executes a heavy
dispense
Standard response
Initialize [init]
Move the AnyFeeder into its
home position; required
before any other action can
take place
> x=16
Initializes the
AnyFeeder
Standard response
Stop [stop]
Stop current action and move
AnyFeeder to home position
> x=15
Executes a stop
Standard response
Startup AnyFeeder
firmware
Start AnyFeeder firmware
(also stops active motions)
> S_RUN
Restarts AnyFeeder
firmware
AnyFeeder will
respond:
m10
m20
to indicate
AnyFeeder is online
Reset Error
Reset error status and moves
AnyFeeder to home position
> x=30
Resets error status
Standard response
Restart Firmware
Restart AnyFeeder firmware;
resets all parameters to
default values
> x=31
Restarts AnyFeeder
firmware and resets
defaults
Standard
response
Table 3-4: Setting Parameters
Command
Description
Syntax
Explanation
Response
Setting the Number of Repetitions
Set Feed Forward
repetitions
Set number of
repetitions for feed
forward
> ab[1]=[turns]
Sets repetitions
No response
Set Feed Forward
repetitions and
execute feed
forward
Set number of
repetitions for feed
forward and
execute motion
> ab[1]=[turns]_x=1
Sets repetitions and
executes motion
Standard
response
Table 3-3: AnyFeeder Serial Commands
Command
Description
Syntax
Explanation
Response