Standard responses, Anyfeeder command parameters default values, Table 3-7 – Adept AnyFeeder User Manual
Page 38
Chapter 3 - Using the AnyFeeder with Serial Communications
38
Adept AnyFeeder User’s Guide, Rev. B
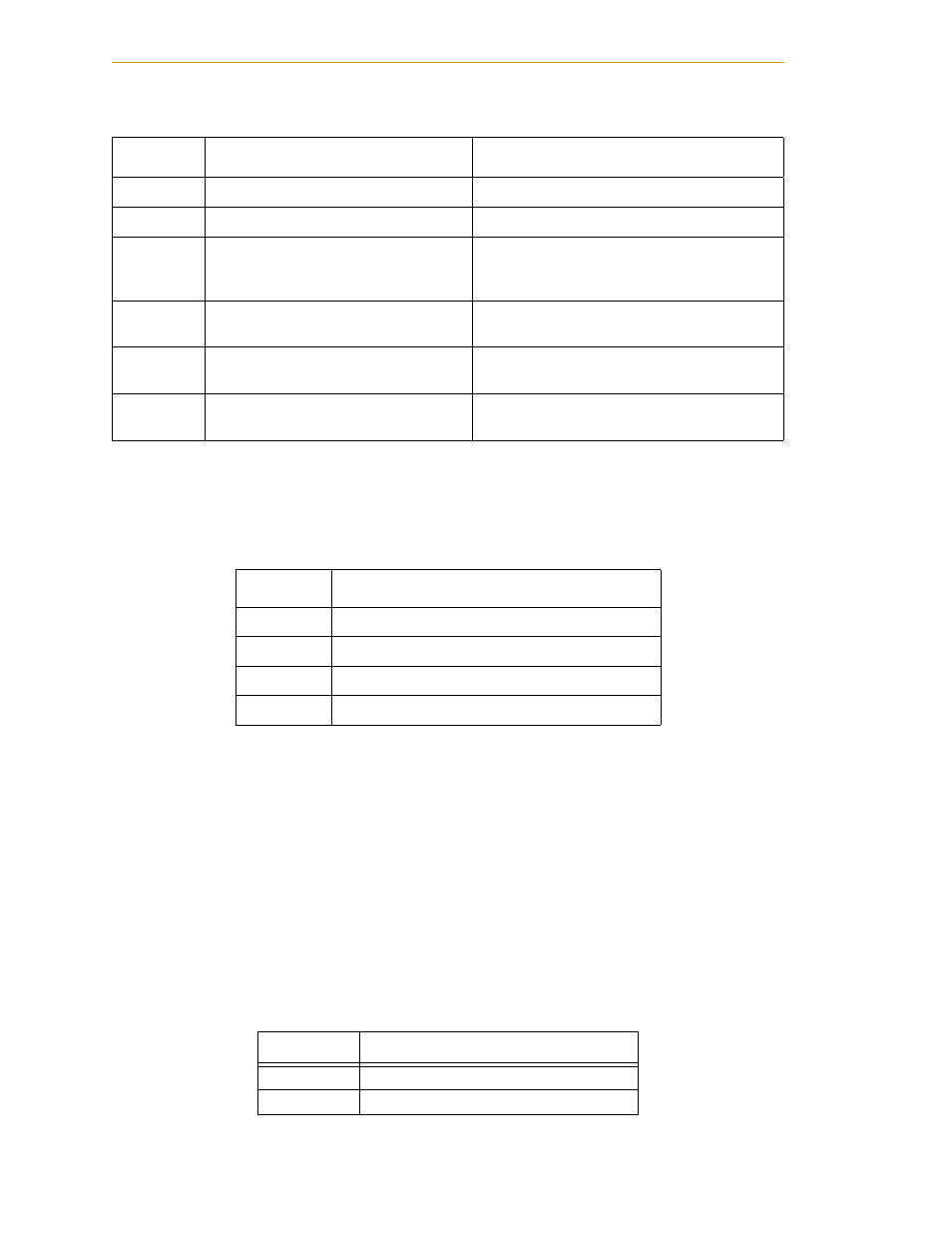
Standard Responses
During normal operation, the responses you should expect to see from the AnyFeeder are
as follows.
AnyFeeder Command Parameters Default Values
shows the default values for the AnyFeeder command parameters. Note that
whenever the AnyFeeder’s firmware is reset, the parameters return to these default
values.
m21
Motor 2 received command and is busy
m22
Invalid command
Command or command syntax incorrect
m23
Motor 2 servo error
Possibly overloaded. Check for obstructions or
hardware problems. Error must be reset before
operation can continue.
m26
Motor 2 not initialized
AnyFeeder must be initialized before
commands can be sent.
m27
Motor 2 error state
Motor 2 reporting an error. Error must be reset
before operation can continue.
m28
Timeout- no sync-signal received
The sync-signal was not received from Motor 1.
Therefore, Motor 2 cannot start its action.
Table 3-6: Standard Responses
a
a
Motors 1 and 2 may report back in different orders,
meaning sometimes motor 1 will report back first and
sometimes motor 2 will report back first.
Because the two motors perform different motions during
the same operation, there will be some time between the
responses.
Response
Meaning
m21
Motor 2 understood command and is busy
m11
Motor 1 understood command and is busy
m20
Motor 2 completed action successfully and is OK
m10
Motor 1 completed action successfully and is OK
Table 3-7: Parameter Default Values
Parameter
Default Value
ab[1]=3
default feed forward repetitions
ab[2]=3
default feed backward repetitions
Table 3-5: AnyFeeder Responses
Response
Meaning
Details