Serial dialog examples, Initializing the anyfeeder, Feeding parts forward – Adept AnyFeeder User Manual
Page 39: Initializing the anyfeeder feeding parts forward
Serial Command Codes
Adept AnyFeeder User’s Guide, Rev. B
39
Serial Dialog Examples
This section provides some examples of serial communication streams for basic Adept
AnyFeeder operations.
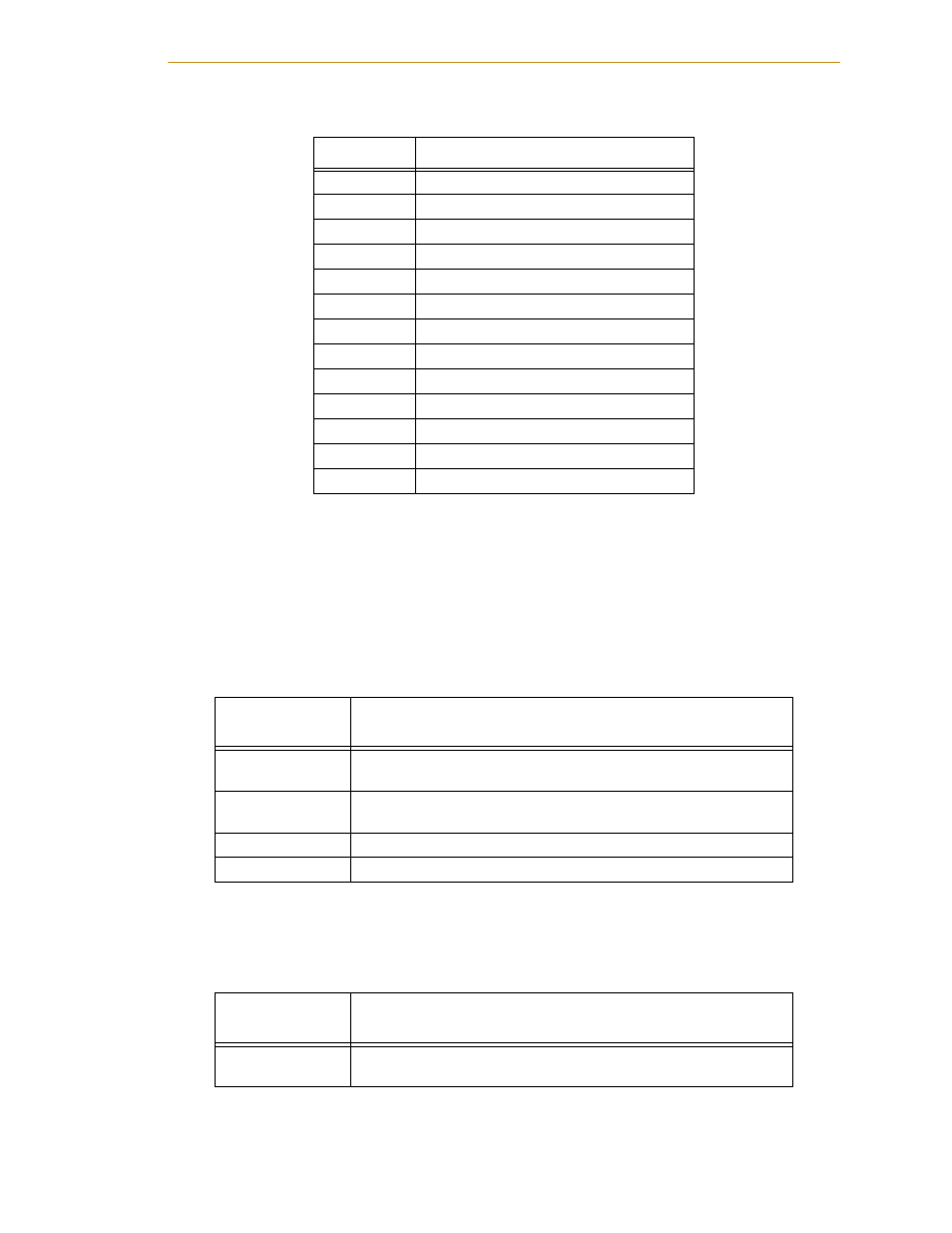
Initializing the AnyFeeder
shows responses to the
Init command (
x=16
).
Feeding Parts Forward
shows responses to the
Feed Forward command (
x=1
).
ab[3]=3
default feed and flip forward repetitions
ab[4]=3
default feed and flip backward repetitions
ab[5]=3
default flip repetitions
ab[6]=3
default dispense repetitions
ab[7]=64
default purge repetitions
ab[8]=3
default heavy dispense repetitions
ab[17]=1
feed forward speed
ab[18]=1
feed backward speed
ab[19]=1
feed/flip forward speed
ab[20]=1
feed/flip backward speed
ab[21]=1
flip speed
ab[22]=1
dispense speed
ab[23]=1
purge speed
Table 3-8: Initializing the AnyFeeder
Terminal
Window
Explanation
m21
Motor/Drive 2 understood command and is now busy, indicated by the
'1'
m11
Motor/Drive 1 understood command and is now busy, indicated by the
second '1'
m10
Motor/Drive 1 completed action successfully, indicated by '0'
m20
Motor/Drive 2 completed action successfully
Table 3-9: Feeding Parts Forward
Terminal
Window
Explanation
m21
Motor/Drive 2 understood command and is now busy, indicated by the
'1'
Table 3-7: Parameter Default Values
Parameter
Default Value