Introduction – Nexen RSD100 964520 User Manual
Page 4
FORM NO. L-21107-H-0108
INTRODUCTION
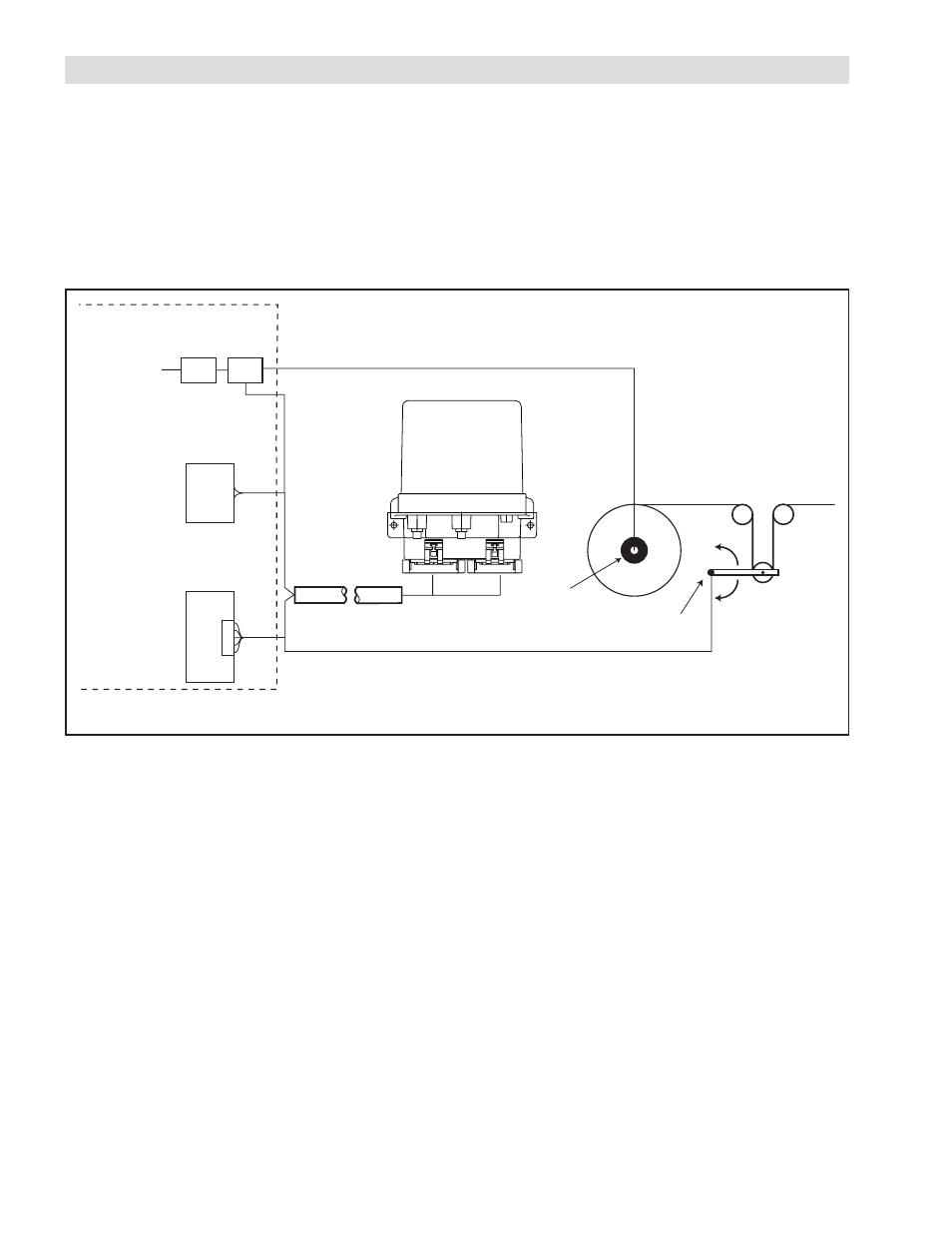
The Nexen RSD100 is a microprocessor based position controller designed to minimize dancer arm movement during
tension disturbances and then return the arm to its running position. The RSD100 features two different control
choices: First, using the analog output and a Nexen current or voltage to pressure transducer such as the EN40 or
EN50 to control a Nexen pneumatic brake or clutch (Refer to Figure 1.); Second, using the analog output as a tension
trim signal for an unwind or rewind motor drive. The RSD100 is housed in a dust tight and drip proof enclosure
enabling it to be mounted near the brake or clutch. All set up parameters are passed to the controller via RS232
connection that makes remote control and adjustment possible.
Figure 1
POWER
SUPPLY
CUSTOMER SUPPLIED
CUSTUMER
AIR SUPPLY
E/P
or
I/P
FILTER
RSD100
OPTIONAL
PLC
Brake,
Clutch,
or Drive
Position
Sensor
Using external e/P or I/P
RSD100 O
veRview
Adaptation is the key to high performance dancer control. As a roll changes from maximum to minimum diameter, a
dancer control must adapt to the corresponding changes in speed, inertia and torque. In addition, many web machines
run wide tension ranges from heavy weight paper to light weight poly, which require very different tension settings.
Being able to adapt for the effects of tension setpoint changes is important when high performance dancer control is
desired. High performance dancer control allows faster machine accelerations and decelerations which means higher
production rates on many machines.