Nexen RSD100 964520 User Manual
Page 22
FORM NO. L-21107-H-0108
A
DvAnceD
t
uning
For most applications the Basic Tuning Parameters will
be sufficient to tune the RSD100. The advanced Tuning
Parameters are for applications with unique requirements
such as extremely fast accelerations/decelerations
where it is desirable to change the individual terms of
the PID algorithm. System Integrators appreciate these
parameters as they provide the flexibility to customize the
control system similar to that of hardware based control
boards
Note: adjusting individual PID values from their facto-
ry default settings should be done only by personnel
experience in the operation of PID controlled closed
loop systems.
Select GaIN from the TUNING pane of the SeTUP
window.
p
ROpORtiOnAl
This parameter corrects for arm position errors and is
generally adjusted as follows:
•
If dancer arm slowly moves towards its setpoint,
increase PROPORTIONAL.
•
If the dancer arm excessively oscillates around the
setpoint position after a tension disturbance, de-
crease PROPORTIONAL.
i
ntegRAl
This parameter corrects for long term position errors and
is generally adjusted as follows:
•
If the Dancer arm slowly oscillates around the set-
point position, decrease INTEGRAL.
•
If the dancer arm settles into a position other than the
setpoint position, increase INTEGRAL.
D
eRivAtive
This parameter corrects for fast changing position errors
and is generally adjusted as follows:
•
If the dancer arm oscillates from one end-of-travel
limit to the other, decrease DERIVATIVE.
•
If the dancer arm drastically overshoots the position
setpoint after a tension disturbance, increase DE-
RIVATIVE.
NOTe: In most dancer arm controller applications, the
two most important parameters are Proportional and
Derivative. In order to simplify the tuning process the
INTeGRaL term can be set to zero, thus leaving only
PROPORTIONaL and DeRIVaTIVe to be adjusted. If
needed, INTeGRaL can be adjusted after the other
parameters are set.
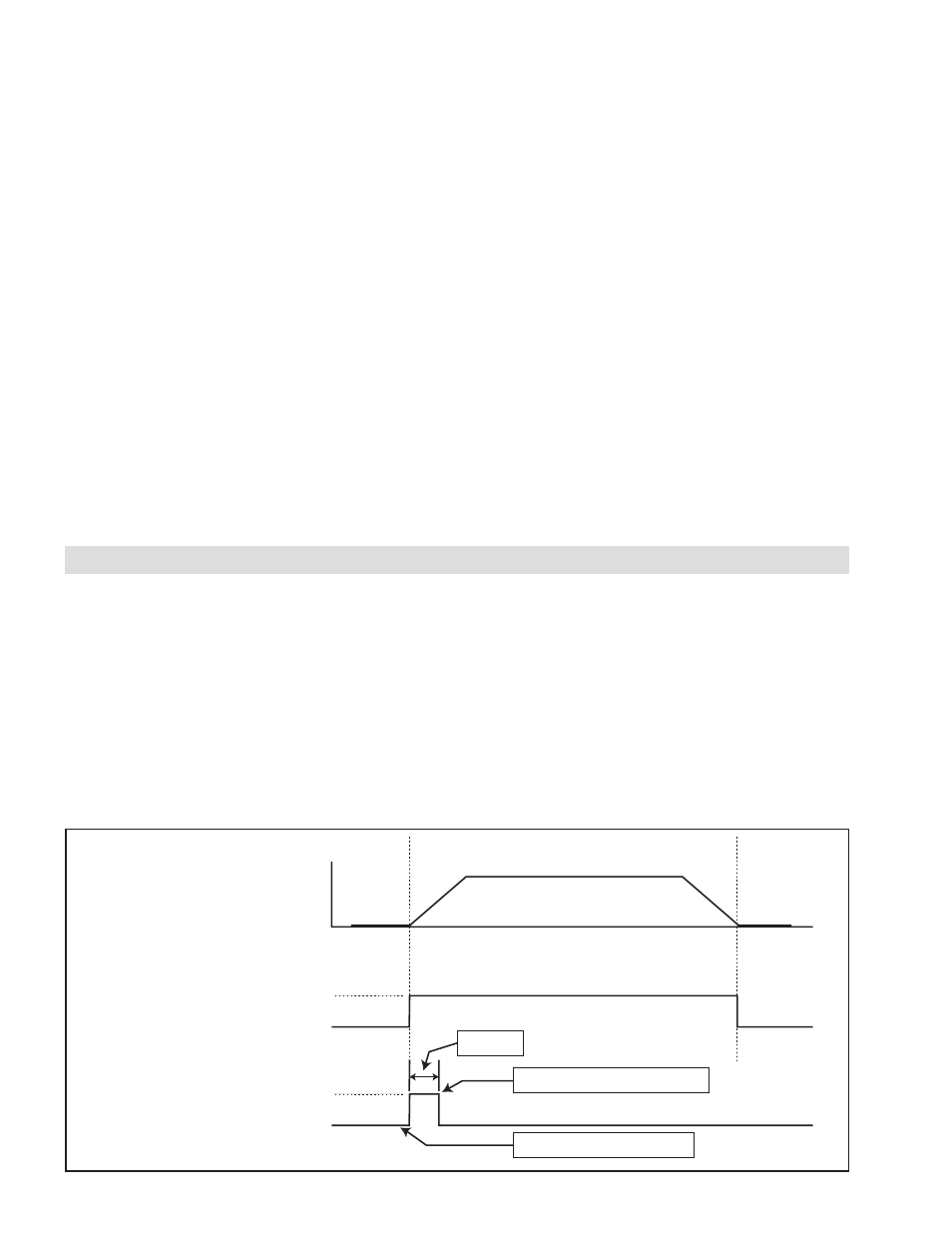
10.0 STaRT SeTTINGS
The Start Settings are used to help the RSD100 output
get from the STOPPED OUTPUT to an operating level
quickly. When the Start Signal transitions from low
to high, the PROPORTIONAL MULTIPLIER will be
applied to proportional gain for the duration of START
DURATION. The Start Settings will help the RSD100
most during full roll starts where the output must climb
quickly to a high output level from the STOPPED
OUTPUT level.
D
uRAtiOn
The DURATION controls how long the PROPORTIONAL
GAIN MULTIPLIER will be applied after the machine
state signal goes high (Refer to Figure16).
Proportional Gain
Machine State
0%
100%
Machine Speed
Time
Machine State
Original Proportional Gain
Multiplied Proportional Gain
Duration
Figure 1
NOTe: To help with full roll starts, use the proportional
multiplier to achieve a high output quickly.
p
ROpORtiOnAl
m
ultiplieR
The PROPORTIONAL MULTIPLIER increases the
RSD PROPORTIONAL term during the START
DURATION. At full roll and core, try several machine
starts from 0 to 100% speed and adjust the DURATION
and MULTIPLIER until the RSD100’s performance is
satisfactory. If the PROPORTIONAL MULTIPLIER is set
to 1, the RSD100 will not apply any Start Boost.