Nexen RSD100 964520 User Manual
Page 23
FORM NO. L-21107-H-0108
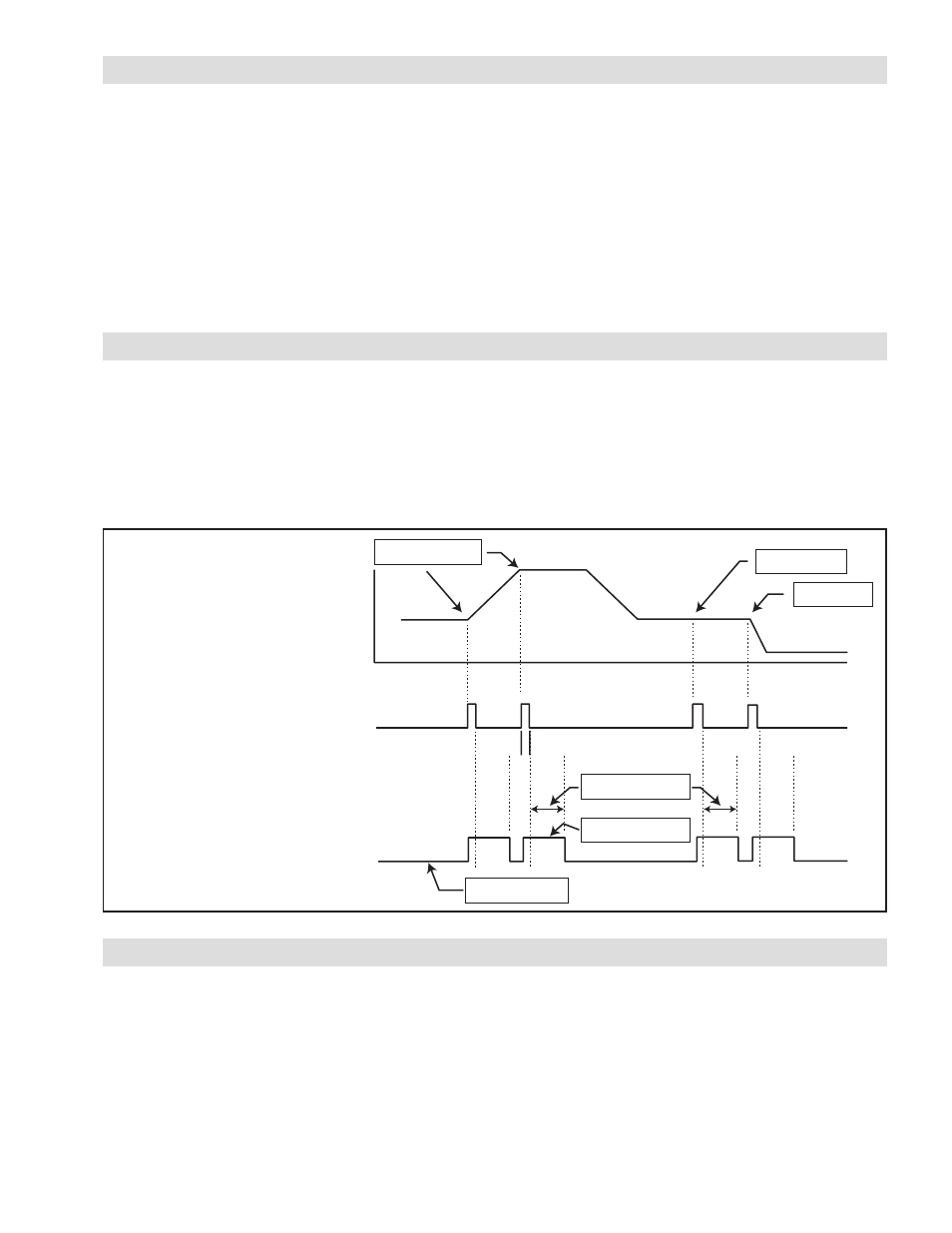
The BOOST signal is used to tailor the performance
of the RSD100 during infrequent events such as
speed changes, flying splices, and rapid stops. When
the BOOST signal transitions from low to high, the
PROPORTIONAL and DERIVATIVE MULTIPLIERs
will be applied to the proportional and derivative gains.
The gains will be boosted for the duration of BOOST
DURATION once the signal transitions from high to low.
11.0 bOOST (OPTIONaL SIGNaL)
D
uRAtiOn
Time in seconds that the PROPORTIONAL and/or
DERIVATIVE MULTIPLIER will be applied after BOOST
INPUT goes from high to low (Refer to Figure 17).
p
ROpORtiOnAl
m
ultiplieR
If Proportional boost is desired, enter a
PROPORTIONAL MULTIPLER.
D
eRivAtive
m
ultiplieR
If Derivative boost is desired, enter a DERIVATIVE
MULTIPLIER.
The RSD100 will maintain the dancer arm position at the Dancer SETPOINT value when the machine is running. For
most applications, the Dancer SETPOINT should be set to 50%. However, the Dancer SETPOINT can be offset
from 50% to provide more or less web storage depending on the acceleration and deceleration requirements of the
machine.
NOTe: If you have trouble with the dancer loop hitting the maximum storage stop at the end of a full roll accel-
erations, set your dancer SeTPOINT for less storage. This will give the dancer more potential storage for ac-
celeration changes. Configuring the bOOST signal will also help with this situation.
1.0 DaNCeR SeTPOINT (%)
Boosted Gains
Original Gains
Boost Duration
0%
100%
Machine Speed
Time
Speed Change
Proprotional & Derivative Gains
Boost Signal Examples
Flying Splice
Rapid Stop
t
Pulse Time (t) must be > 100ms
Web JOGGING
During job changes, it is common to jog a new web
through the machine. This is often accomplished by the
operator pressing the JOG button on the machine’s
operator panel. As long as the button is depressed
the web slowly advances through the machine. Once
the operator lets go of the JOG button, the web stops
moving. This can be repeated many times over a short
period of time. During instances such as this, the
RSD100 would perform better if left in the RUN mode
continuously. Otherwise, it will go through a START-
RUN-STOP sequence every time the web is jogged. The
BOOST signal can be used as a START mode while the
RSD100 is running.
Figure 1