5 averaging and response time, Averaging and response time – Delta CS24D User Manual
Page 26
26
8.5 Averaging and Response Time
Since the internal signals used by CS24D can be fairly weak (especially with dark target colors), they
are subject to a variety of electrical and optical noise sources. The CS24D uses an exponential moving
averaging allowing up to 4096 readings to be averaged to reduce noise. In many applications,
averaging provides significant performance improvements, and we generally recommend setting the
averaging as high as is practical. The limiting factor is the response time.
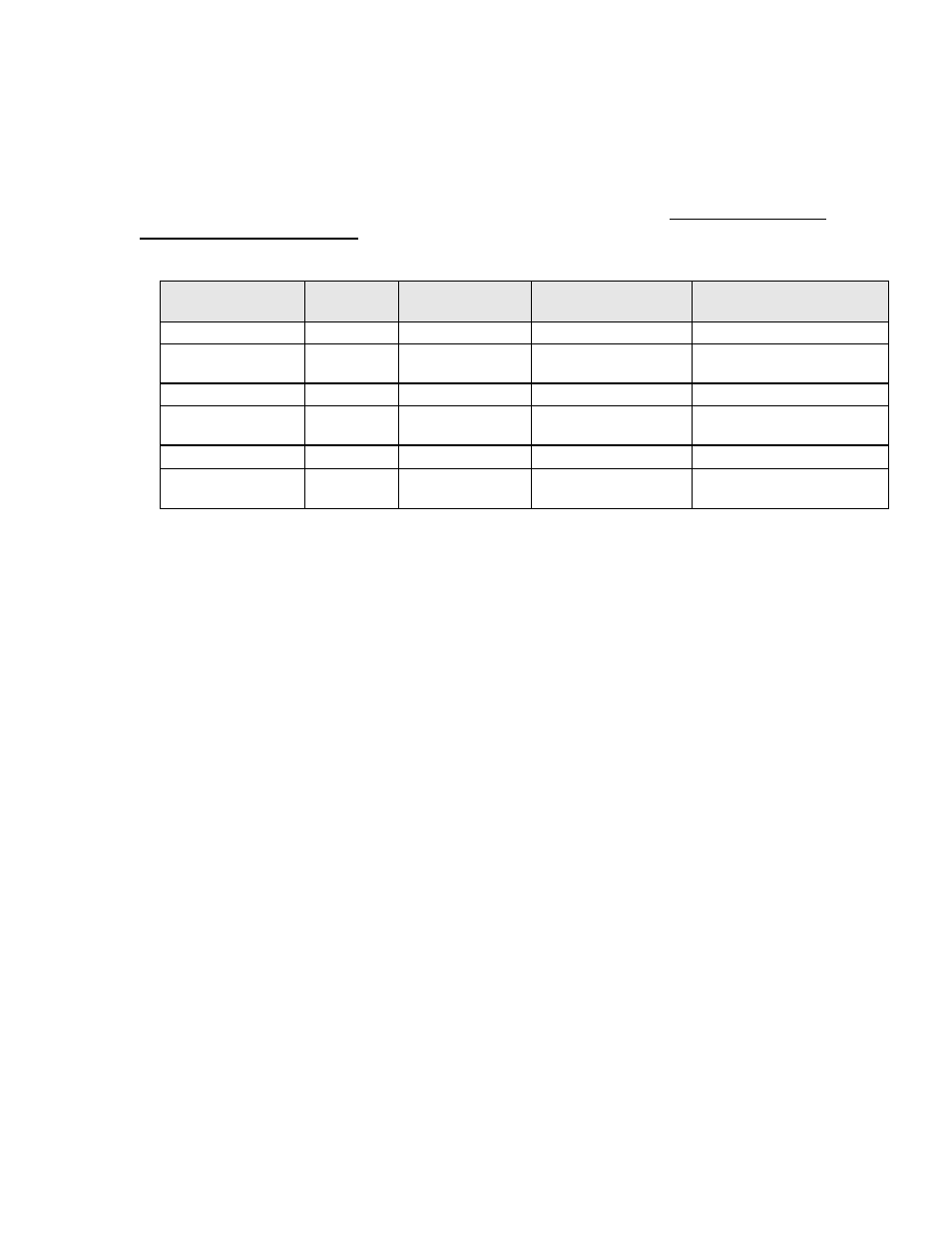
The chart below shows the CS24D response time for various conditions:
Sort Outputs
Used
Averaging
Output Update*
Response Time
Minimum
Response Time
Maximum*
1 to 4
No
2ms
3ms
3ms
1 to 4
Yes
2ms
Readings Averaged
+ 4ms
(Readings Averaged x2)
+ 2ms
5 to 8
No
3ms
4ms
4ms
5 to 8
Yes
3ms
Readings Averaged
+ 4ms
(Readings Averaged x2)
+ 4ms
9 to 16
No
4ms
6ms
6ms
9 to 16
Yes
4ms
Readings Averaged
+ 4ms
(Readings Averaged x2)
+ 4ms
*Serial communications over the RS232 port can add up to 7ms to the Update and response times
depending on data transfer activity. The CS24D color sensor is not intended to be operated with the
RS232 Serial port in use.
The CS24D reads all four LED colors once per millisecond. The output update time depends on the
setup, in particular the number of Sort Outputs used and the number of readings averaged. Readings
are averaged using a sliding window number of milliseconds worth of readings. Each millisecond a
new reading is added to the window and the oldest reading is removed. The outputs are continuously
updated at the Output Update rate.
The total response time, from when an object is placed under the sensor to the time the outputs are
updated to reflect the color of the object, is dominated by the Averaging parameter for settings of 4 or
above. The exponential moving average takes 1 to 2 milliseconds per reading averaged to reach the
new reading, depending on the difference between the readings.
Note that during the time that the sensor is averaging the data from a new object, the outputs may
temporarily show an incorrect value based on the average of the new color and the previous color. To
prevent this, the host system should delay for a period of time at least equal to the Maximum Response
time before using the CS24D outputs after a new object is placed in the sensing area.
An additional parameter that can affect response time is the Pulse Stretch parameter. This parameter
causes the CS24D to make sure that any binary Output is maintained for at least the number of
milliseconds specified by the Pulse Stretch parameter. For maximum response, set the Pulse Stretch
parameter to 0.