Feedback_effort, Loop_config – Maxim Integrated MAX15303 PMBus Command Set User Manual
Page 48
MAX15303 PMBus Command Set User’s Guide
Page 48 of 52
FEEDBACK_EFFORT
Reference:
Maxim Specific
Lockable:
Yes
Command Code:
0xD3
Format:
Linear
Data Bytes:
2
Units:
Scalar
Transfer:
Read Byte
Factory Value:
0xB200 (0.5)
Description/Notes: This command allows some user adjustment of the tradeoff between transient response, load
regulation, and output noise. The default value is 0.5, which provides a good balance of transient
response performance and output noise characteristics.
Lower values of FEEDBACK_EFFORT (as low as 0.0) will tend to provide lower output noise, at the
expense of transient performance and slightly reduced load regulation accuracy.
Higher values of FEEDBACK_EFFORT (up to 1.0) will provide improved transient response and load
regulation, at the expense of increased output noise and PWM waveform rising/falling edge “jitter.”
As a generalization, increasing FEEDBACK_EFFORT tends to increase effective control loop bandwidth,
while decreasing FEDBACK_EFFORT reduces bandwidth.
Wait at least 500μs for execution after sending the FEEDBACK_EFFORT command before sending
additional PMBus commands.
LOOP_CONFIG
Reference:
Maxim Specific
Lockable:
Yes
Command Code:
0xD5
Format:
Bit field
Data Bytes:
2
Units:
N/A
Transfer:
Read/Write Word
Factory Value:
0x0100
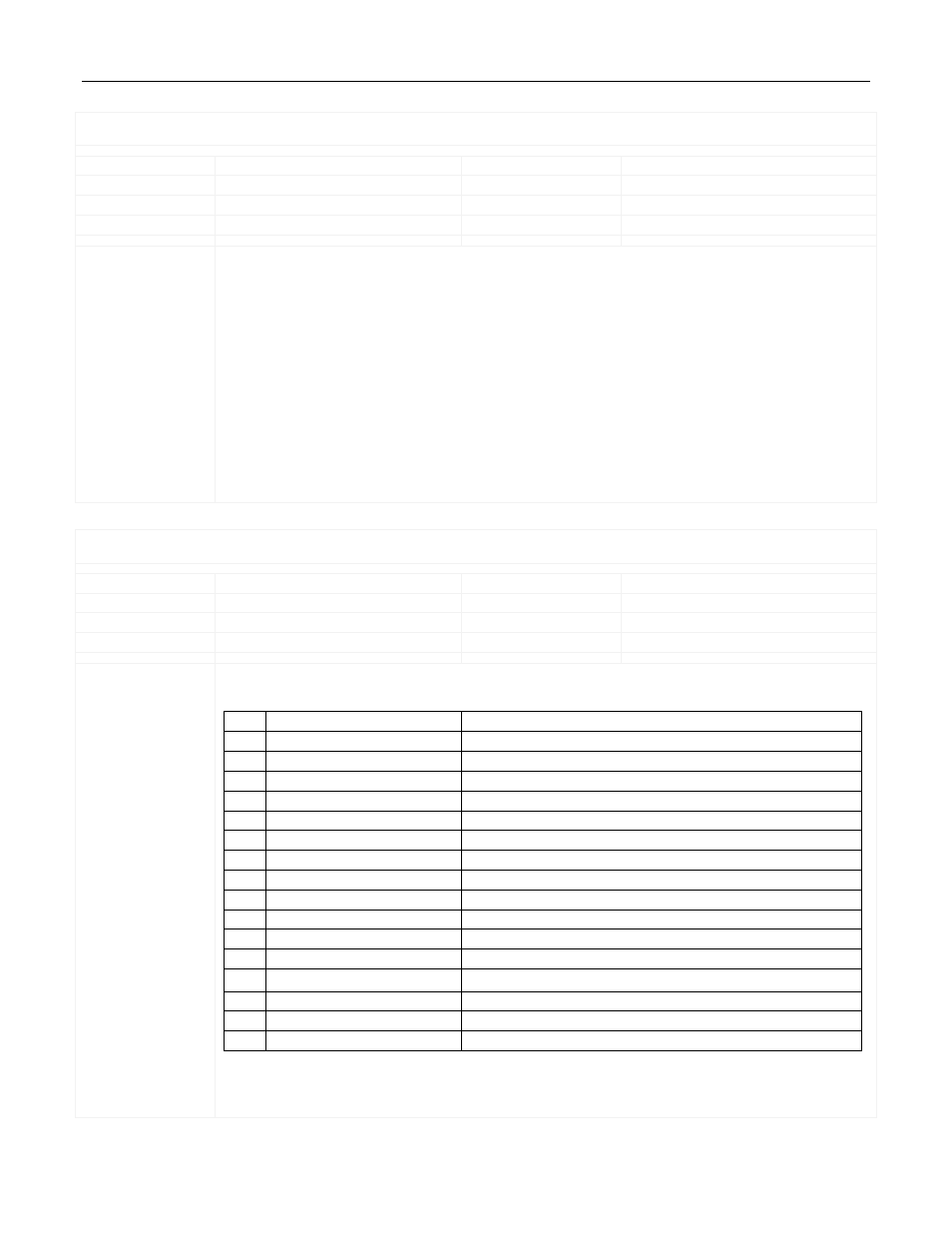
Description/Notes: The LOOP_CONFIG command configures miscellaneous control-loop features of the MAX15303. Each
bit in the two data bytes enables a particular function as follows:
Bit
Name
Effect When True
15
14
13
12
11
10
9
NOGAINCALC
The control loop will only use hard-coded NLSS gain values
8
PIDMODE
Enable integral term in the control loop (set by default)
7
6
5
4
AGDEN
Enable adaptive gate-drive timing system (not supported)
3
NEGDUTYEN
Enable low-side body diode “braking” on load-release transient
2
1
0
Wait at least 500μs for execution after sending the LOOP_CONFIG command before sending
additional PMBus commands.